A DEMONSTRATIVE EXPERIMENT IN STATICS
Rudy Vilca Salinas
Resumen
Se resuelve un problema de un sistema sencillo en equilibrio y luego se realiza la verificación experimental del resultado. Se destaca la fácil realización de este experimento siempre que se siga el procedimiento indicado.
Código(s) PACS: 06.60.-c, 01.50.Pa
Abstract
We solve a problem about a simple system in equilibrium and its experimental verification. If the indicated procedure is followed, this experiment is straightforward to carry out.
Subject headings: laboratory procedures - laboratory experiments and apparatus
1 El Problema
El problema a tratar, tiene que ver con la siguiente figura:
Lo que se ve no es más que un famoso pato que no necesita presentación, que se halla parado sobre una tabla, de cuyos extremos salen dos cables que se sujetan a dos soportes.
Esta figura tiene algo de particular, y es el hecho de que si el pato se mueve a uno u otro lado (izquierda o derecha), la tabla sobre la que se encuentra, ya no estará más de forma horizontal. Sólo asume la tabla esta posición cuando el palmípedo se halla a cierta distancia x, que habrá que calcular.
2 Determinación de x
Para la determinación de x, seguiremos dos pasos. En el primero hallaremos la tensión de la cuerda derecha, y con este dato, en el segundo paso hallaremos x.
2.1 Paso 1
Identificamos las fuerzas que actúan sobre la tabla, y también señalamos algunos datos importantes que configuran al sistema. WT denota el peso de la tabla que se considera que actúa en su punto medio.
Figure 2: Fuerzas que actúan sobre la tabla.
Se suponen conocidos los pesos del pato (WD) y de la tabla (WT), la longitud L de esta última, así como los ángulos α y β.
]]>
Figure 3: Suma vectorial de las fuerzas.
Como las cuatro fuerzas están en equilibrio, entonces la suma vectorial es como se muestra en la figura 3. Recordamos que si las fuerzas están en equilibrio, ∑→F = 0, y por tanto, la cadena de flechas tiene que cerrarse. Aplicando el teorema de los senos a este triángulo:
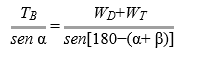
de donde resulta:

De manera análoga podemos hallar, si quisiéramos, la otra tensión, pero para nuestros propósitos no interesa.
2.2 Paso 2
Ahora procedemos a hallar x, y para ello, guiándonos con la figura 4, tomamos momentos res-pecto al punto O. Para hacer la tarea más fácil, La tension TB la hemos descompuesto en dos: en TBy y TBX (iguales a TB cosβ y TB sen β, respectivamente). Como la tabla está en equilibrio, se deberá tener:
![]()
luego:
![]()

Que es lo que buscábamos.
3 Verificación Experimental
Para llevar a cabo la verificación del resultado obtenido para x, armaremos el sistema de la manera más sencilla, y para ello, haremos una variante: en lugar de una tabla, usaremos un palo (cuyo peso seguiremos representando como con la tabla, WT, para no tener problemas con la notacion de las ecuaciones anteriores); y no le exigiremos al pato que se mantenga sobre el palo haciendo equilibrio, sino que le haremos simplemente colgar de manos del palo (con ayuda de una cuerda), lo cual (salvo alguna fatiga para el pato), viene a ser lo mismo para fines del equilibrio. Lo que necesitaremos será:
Instrumentos
Un transportador (ver sección 3.1.2)
Un flexómetro.
Materiales
Un palo de unos 2 m.
Un lápiz o bolígrafo cilíndrico.
4 m de cordel no elastico.
2 tornillos pequeños con ojal.
Un muñeco ( pato) de unos 25 cm.
Una botella de plástico de 500 cm3 llena con agua.
Una plomada de unos 60 cm.
Figure 4: Los momentos de las fuerzas se toman respecto al punto 0.
3.1 Montaje Previo
]]> Antes de realizar el montaje final, es necesario hacer un montaje previo a fin de conocer los pesos del "pato mas su botella", y la del palo. Si hubiera una balanza, no estaria mal, pero la idea es prescindir de ella, siguiendo un camino alternativo que simplemente resulta genial.3.1.1 Determinación de los pesos
Si se observa la ecuación 2,-y en especial, en esta observación consiste mi contribución-, se advertirá que en realidad no necesitamos conocer los pesos absolutos, sino que basta con su relación, concretamente, WT/WD, lo cual como a continuación veremos, es fácil obtener.
Figure 5: Montaje para hallar la relación de los pesos.
Comenzamos por armar el montaje que se muestra en la figura 5. Los pasos a seguir son los siguientes:
[i.]
Primeramente, en cada extremo del palo ajustamos los tornillos.
Amarrar la botella con agua, a las espaldas del Pato.
Amarrar la cuerda de 50 cm, a las manos del pato, a manera de esposas.
]]> Sobre una mesa, cerca y paralelamente a un borde, se coloca el lápiz o bolígrafo cilíndrico.Sobre el lápiz, cruzándolo, se coloca el palo de tal manera que sobresalga un poco de aquel borde de la mesa cercano al lápiz.
Del extremo del palo que sobresale a la mesa, del tornillo, se cuelga al pato.
Se hace rodar lentamente el palo sobre el lápiz hasta que el pato quede equilibrado con el propio peso del palo.
Cuando el palo está equilibrado, se mide Y. Medir también la longitud L del palo. La condición de momentos para el equilibrio del palo respecto al punto de apoyo dá:
![]()
de donde obtenemos la relación clave:

3.1.2 Preparación del transportador:
[i.]
Imprimir uno grande de internet (en hoja tamaño carta). La hoja impresa se pega sobre un cartón consistente.
]]> Hacer un orificio en el centro del transportador (no grande, sino justo del diámetro de la cuerda de la plomada).Desde el lado de la cara del transportador, atra-vesar la cuerda de la plomada, por el orificio.
Hacer un nudo del otro lado, para que la cuerda ya no salga.
3.2 Montaje Final
[i.]
Cortar la cuerda de 4 m en dos partes: una de 1.5 m, y la otra de 2.5m. Amarrar uno de los extremos de cada cuerda a los tornillos del palo.
Los extremos libres de las cuerdas, sujetarlos a dos soportes, que estén a la misma altura. Si en los soportes sobran las cuerdas, que sobren la misma longitud (esto garantizará que el palo, quede colgando con apreciable inclinación respecto a la horizontal).
3.3 Procedimiento
3.3.1 Para hallar x: Método 1
Estando ya preparado el terreno, en lo que sigue, se puede proceder de diferentes maneras. La mas sencilla por ejemplo, es hacer participar a dos grupos de estudiantes (de 3 por ejemplo). Un grupo agarra al pato y lo cuelga del palo (lo que equivale a que esté parado encima). Para colgar al pato, es cómodo que la cuerda que lleva en sus brazos como esposas tenga un nudo corredizo en un extremo, de tal forma que sea fácil asegurar y desaflojar. A continuacion moverán al pato, procurando que el palo se ponga horizontal. Cuando esto suceda (lo cual ha de verificarse con el transportador), entonces, en un cuaderno toman nota "en secreto" de la distancia x que hay entre la posición del pato y aquél extremo del palo que se halla junto al ángulo α. El cuaderno con el dato de x, se cierra en espera del resultado del otro grupo.
]]> Estando el palo horizontal, el otro grupo procede a medir los ángulos haciendo uso del transportador.Con estos datos y el de la relación de los pesos, determinan x haciendo uso de la ecuación 2. Este resultado lo dan a conocer a todos los presentes. Es entonces cuando se abre el cuaderno y, se verifica: deberían coincidir los resultados.
3.3.2 Hallando x: Método 2
En este método, se sustituye la medición de los ángulos por ciertas medidas de longitud. Lo que se gasta en un mayor desarrollo teórico, se gana en alcanzar es un mayor impacto.
En la ecuación 2 en la parte de los ángulos, si se desarrolla el seno de la suma de los ángulos, y se simplifica con el numerador, resulta que:

Por otra parte, cuando el palo esté horizontal, se tendrá la siguiente configuración:
Figure 6: Configuración con el palo horizontal.
]]> En la figura 6, puede comprobarse que:
y
![]()
de modo que:
![]()
y con lo cual, la expresión 4 queda:
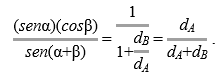
Dado que (ver fig. 6):
![]()
la expresión anterior resulta igual a:

Será conveniente deshacernos de dA. Veámos cómo lo hacemos.
Por el teorema de Pitágoras:

Dividiendo (7)/(5) miembro a miembro:

Figure 7: Situación inicial del sistema.
Figure 8: Un muñeco en la posición calculada, logrando poner horizontal al palo.
Figure 9: Manera de usar el transportador para medir el ángulo.
Figure 10: Vista del muñeco, cargado de su botella.
De 5 y 8, resulta:
Y entonces, la relación dA/(D − L) que figura en la ecuación 6 será igual a:

La ecuación recién encontrada, es con la que opera el método 2. Observando esta ecuación, queda claro que para hallar x, además de conocer la relación de los pesos y la longitud del palo L, se necesita conocer tres nuevas longitudes:
[i.]
Las longitudes LA y LB de las cuerdas (desde el punto de sujeción en el soporte, hasta su unión con el extremo correspondiente del palo).
La longitud D, que es la distancia (horizontal) entre los puntos de sujeción en los soportes.
Recordamos que en la sección 3.1.1, se consideró la obtención de la relación de pesos, para lo cual, en el montaje correspondiente, se mide Y y L (Fig. 5), y la ecuación 3 nos da la relación deseada.
Finalmente, habiéndose encontrado el valor de x, se cuelga al pato a esta distancia, y el sistema debería quedar con el palo horizontal.
En varias realizaciones del experimento (Fig. 8), los resultados obtenidos, fueron satisfactorios.
File translated from TEX by TTH, version 3.89. ]]> On 14 Jun 2013, 14:15.
]]>