










Servicios Personalizados
Revista
Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkInvestigación & Desarrollo
versión impresa ISSN 1814-6333versión On-line ISSN 2518-4431
Inv. y Des. vol.1 no.17 Cochabamba 2017
http://dx.doi.org/10.23881/idupbo.017.1-8i
ARTÍCULOS–INGENIERÍAS
VARIABLE STIFFNESS HAND PROSTHESIS: A SYSTEMATIC REVIEW
PRÓTESIS DE MANO DE RIGIDEZ VARIABLE: UNA REVISIÓN SISTEMÁTICA DEL ESTADO DEL ARTE
S. Cecilia Tapia-Silesa, Oscar Urquidi-Gandarillasb and Markus Pakleppac
aCentro de Investigación de Procesos Industriales, Universidad Privada Boliviana,
bCarrera de Ingeniería electromecánica, Universidad Privada Boliviana,
c Mechanical engineering department, University of Dundee
(Recibido el 15 mayo 2017, aceptado para publicación el 13 de junio 2017)
ABSTRACT
Prosthetics is an important field in engineering due to the large number of amputees worldwide and the associated problems such as limited functionality of the state of the art. An important functionality of the human hand is its capability of adjusting the stiffness of the joints depending on the currently performed task. For the development of new technology it is important to understand the limitations of existing resources. As part of our efforts to develop a variable stiffness grasper for developing countries a systematic review was performed covering technology of body powered and myoelectric hand prosthesis. Focus of the review is readiness of prosthetic hands regarding their capability of controlling the stiffness of the end effector. Publications sourced through three different digital libraries were systematically reviewed on the basis of the PRISMA standard. We present a search strategy as well as the PRISMA assessment of the resulting records which covered 321 publications. The records were assessed and the results are presented for the ability of devices to control their joint stiffness. The review indicates that body powered prosthesis are preferred to myoelectric hands due to the reduced cost, the simplicity of use and because of their inherent ability to provide feedback to the user. Stiffness control was identified but has not been fully covered in the current state of the art. In addition we summarise the identified requirements on prosthetic hands as well as related information which can support the development of new prosthetics.
Keywords: Hand Prosthesis, Prosthetics, Variable Stiffness, Compliant Joint.
RESUMEN
El estudio de prótesis es un campo importante en la ingeniería debido al gran número de amputados en todo el mundo y los problemas asociados. Entre estos problemas están las limitaciones en funcionalidad de las prótesis modernas. Una funcionalidad importante de la mano humana es su capacidad de ajustar la rigidez de las articulaciones dependiendo de la acción realizada. Es importante entender las limitaciones de los recursos existentes para poder proponer algún desarrollo tecnológico en el área. Como parte del trabajo para desarrollar una garra de rigidez variable para los países en desarrollo, se realizó una revisión sistemática de la tecnología que cubre las prótesis de mano mecánicas y mioeléctricas. El eje de esta monografía es la disponibilidad de prótesis de manos con respecto a su capacidad de controlar la rigidez del efector final. Se ha usado la metodología PRISMA para hacer una revisión sistemática de documentos obtenidos a través de tres bibliotecas digitales diferentes. Se presenta una estrategia de búsqueda, así como la evaluación PRISMA de los registros resultantes que abarcó 321 publicaciones. Se evaluaron los registros obtenidos y se presentan los resultados de la evaluación de la capacidad control de rigidez de los dispositivos. La revisión indica que las prótesis mecánicas son preferidas respecto a las manos mioeléctricas debido al coste reducido, la simplicidad de uso y sobre todo a su capacidad inherente para proporcionar retroalimentación al usuario. Se ha identificado el control de la rigidez en algunos registros, pero no se ha estudiado completamente en esta monografía. Finalmente, los requisitos del usuario para prótesis de manos han sido identificados, así como información sobre tecnología relacionada capaz de impulsar el desarrollo de nuevas prótesis que satisfagan estos requerimientos.
Palabras clave: Prótesis De Mano, Rigidez Variable, Articulación Flexible.
1. INTRODUCTION
The most recent national census of Bolivia (2012) revealed that there is a group of 340.000 handicapped people in the country [1]. Amongst them, 34 % have some sort of motor disability [2]. Although these are the official results of the Census, some programs on disability, such as the National Plan for Equality and Equalization of Opportunities (PNIEO), prefer to apply the 10% global average prevalence of disability established by the World Health Organization (WHO)[3].
Worldwide prosthetics technology has evolved to the point of creating artificial limbs that have the same metabolic cost of the amputated limb [4], they can even induce the feeling of tactile feedback to the user [5].Although technology has evolved trying to restore the functionality of a lost limb, there is a large number of people abandoning their prosthetic upper limbs [6][7]. Modern hi-tech prosthesis are expensive and not necessarily cover basic functions required by the individual needs [8].There is a noticeable preference of body-powered prostheses over myoelectric prostheses due to cost, durability, ease of use, and direct force feedback [7][9].Grasping force control and finger stiffness is important for daily tasks, but is not necessarily taken care of in commercial devices, it comes as a result of position or velocity control [10].The ability of current upper limb prosthetic technology regarding their ability to regulate grasping stiffness is unclear. Therefore a systematic review was performed to determine the state of the art of variable stiffness applied to prosthetic hands or terminal devices.
2. HAND PROSTHESIS OR TERMINAL DEVICES
The human hand has 24 degrees of freedom, in a volume of 500 cc, or less, and a weight of less than 500 grams [11]. An artificial hand with that weight is perceived as heavy by the user. The weight of the prosthesis is causing pressure on a small skin area, causing discomfort and even damaging it.
A prosthetic hand is the terminal device or the end effector of upper limb prostheses. In terms of actuation, it can be body powered or externally powered. In terms of morphology it can be a hand, a hook or a special terminal device or attachment for specific tasks, like sports devices or work tools.[9]The standard upper limb prosthesis is body powered. It is still similar in concept to the Ballif arm. The Ballif arm dates from 1812 and uses the principle of a shoulder or arm movement to control the terminal device[9].
Body powered devices are generally operated by cables and springs. The cable, controlled by a harness on the shoulder and passed along the elbow, acts in one direction and the spring in the opposite direction. This means that a terminal device can be Normally Closed (NC; Voluntary Opening, VO) or Normally Open (NO; Voluntary Closing, VC). The VC device type is inspired by the human hand movements; it usually has a cam lock mechanism to keep it closed to avoid the continuous pull needed to hold an object. In contrast, the VO mechanism, is not as natural as the VC one, but requires an effort only to open it as the spring will exert the force on the object to be hold. Split hooks are usually VO, and tend to be preferred when functionality is more important over aesthetics. These are considered to be counterintuitive and so the force feedback can be confusing for the user.
Externally powered prosthesis have been proposed in the late 1950s to assist high level bilateral amputees [9]. They have evolved to become very sophisticated robotic devices, usually controlled by myoelectric signals and with a wide variety of feedback mechanisms.
The scope of this review covers body powered as well as externally powered devices, but it will be focused on hands or terminal devices and related technology.
3. METHODS
The Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA -P) method[12], has been chosen to conduct this review with an unbiased and organized approach. Technology Readiness Levels (TRLs) [13] have been used in order to assess the level of development of the devices found by the PRISMA-P methodology.
3.1 PRISMA –P methodology
The PRISMA-P methodology proposes an evidence-based methodology for systematic reviews and meta-analyses. Although this system was initially proposed for health care reviews, it has been found very useful as a basis for reporting systematic reviews of technical research as well.
The PRISMA methodology suggests the description of all the information sources and the presentation of the full electronic search strategy of at least one database, in order to make it repeatable for the reader. It also requires to state the process for selecting studies and to describe methods of data extraction from reports.
3.2 TRL assessment
Technology Readiness Levels(TRLs) are a system used to identify the level of technological maturity of a device.
The system was invented by NASAs researcher Stan Sadin in 1974.It was formally defined by 7 levels of technology readiness in 1989. The present system uses a 9 level scale, where TRL1 indicates that an idea is being implemented in a practical application, based on observations of basic principles. The highest level (TRL9) identifies technology that has been fully incorporated into a larger system and is considered operational. [13]
This system was meant to identify when a device was ready to be part of a real space mission. Nowadays, the system has proven to be so useful in different fields like the oil and gas industry and not only in aerospace applications. For example, the biggest EU Research and Innovation programme, Horizon 2020 (H2020), is using TRLs to specify the scope of activities in projects they fund. Although the concept for different fields is similar, the definitions of each level vary according to the applications, and therefore Horizon 2020 has added a TRL 0 that identifies an idea or unproven concept, where no test has been performed yet.
The definitions used in this paper (see TABLE 1) correspond to the definitions of the EU Research and Innovation programme Horizon 2020.
TABLE 1 - TRL DEFINITIONS USED IN THIS REVIEW
The data and devices included in this article have been reported in scientific literature. They have been identified by searches in PubMed, IEEE Xplore and the ASME digital Library. The articles selected had to present work on prosthetic hands, prosthetic upper limbs, variable stiffness hands, reviews about these subjects and technology related to these devices.
3.4 Exclusion criteria:
Amongst the papers retrieved some subjects that were irrelevant for this review had to be filtered. Some of the subjects excluded were:
● Prosthetic lower limb
● Prosthetic larynx
● Electro stimulation of muscles
● Implants
● Models of prosthetic implants
● Neuroimplants
● Magnetorheological fluids
● Crown cementing for divers
● Rehabilitation
● Exoskeleton (assist devices)
● Biomechanical study of motion
● Haptics for augmented reality
3.5 Information Sources
Scientific article databases were used to perform a systematic search of selected terms. Main databases were identified in the medical field (PubMed) as well as the main engineering ones (IEEE Xplore, ASME digital Collection).
3.6 Search strategy
The search strategy was defined according to the main question of this review: Is there any prosthetic hand with the ability to regulate grasping stiffness? The full search strategy is summarised in TABLE 2 for the IEEE Xplore database, including the number of records found in each search performed.
TABLE 2 - SEARCH STRATEGY AND RESULTING RECORDS (FOR IEEE XPLORE)
4. CLASSIFICATION OF RECORDS
The records assessed were classified according to the technology used, as can be seen in Figure 1.
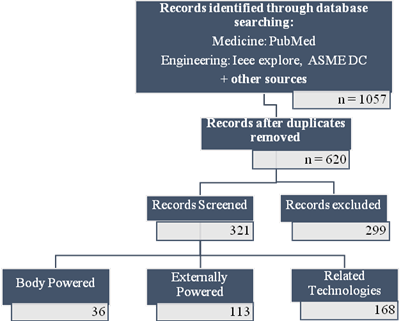
Figure 1 - Classification of records retrieved.
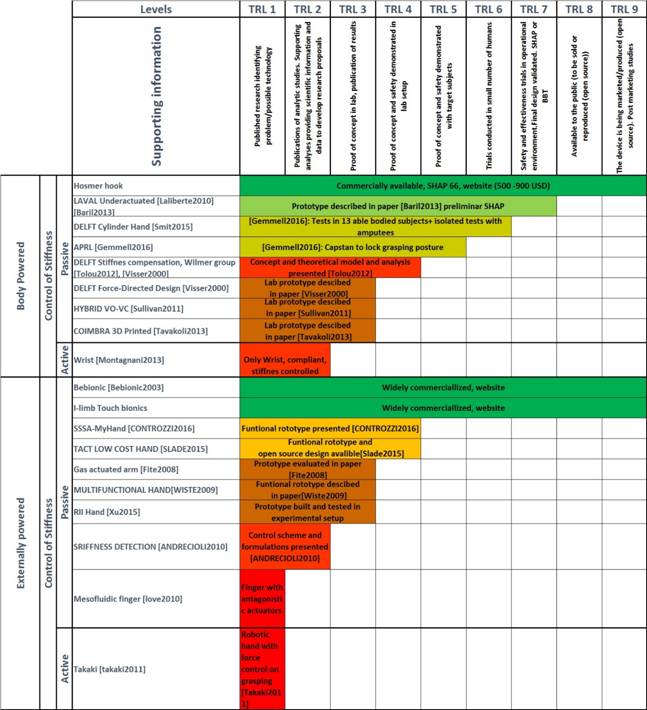
The technology readiness assessment was performed only on the most relevant records. An extra classification level was introduced where each group, Body Powered and Externally Powered, was subdivided in passive or active control of the device stiffness. The TRL level reached by each device, as well as the supporting information used to classify it, can be seen in Table 3.
TABLE 3 - TECHNOLOGY READINESS LEVELS OF SELECTED RECORDS
5. RESULTS
Based on the previously introduced methodology we retrieved a set of publications which we subsequently analysed regarding their technical readiness in particular with a focus on variable stiffness. In addition we review the available means of actuation in current hand prostheses as well as their functionality.
● Underactuation
Underactuation is a desirable characteristic in a well-designed hand. Fewer actuators than degrees of freedom mean self-adaptability of fingers. In consequence underactuated grippers can have shape adaptation and therefore improved grasping capabilities as described in [14],[15].
A prosthetic hand with one externally powered actuator, could as well be body powered [16][17] as the degrees of actuation are low. Nevertheless, effective underactuated prosthetic gripper with shape adaptability and low complexity is still a challenge.[14]
● Functionality
The I-limb, from Touch Bionics (Livingston, United Kingdom), provides different grip profiles that can be activated by the user[18]. It also offers additional Bluetooth devices, so called grip chips, which can be attached to an object in order for it to be recognized automatically by the hand, which in turn automatically selects the adequate grip profile.
The Bebionichands, developed by RSL Steeper (Leeds, United Kingdom) and recently purchased by OttoBock (Duderstadt, Germany), as well as the Michelangelo hand (OttoBock; Duderstadt, Germany) both show a natural movement and a set of different grasping and holding functions. The user has to learn the usage of these functions first, as their control requires the activation of specific muscles in a certain pattern [19].
The Delft Cylinder hand is a hydraulically body powered hand. It provides a fully articulated hand at a low weight (273g). The hand has two grasp patterns, namely precision grip and power grip. It has an underactuated adaptive structure that requires one control signal [20][21]. As it is body-powered it provides the user with proprioceptive force and position feedback without additional sensors.
Out of the 312 selected records a total of 113 publications focussed on mechatronic prosthesis. Most of the mechatronic devices are controlled by myoelectric signals. The Multifunctional Hand can be used with a multi-channel myoelectric interface. It represents a complex design with 16 joints and 5 independent actuators [30]. Amongst the myoelectric group, the TACT HAND is a low Cost 3D printed Myoelectric Hand. It is targeted at the low income population of developing countries, trying to achieve a performance comparable to hands two orders of magnitude more expensive. The open source design files are available online, and as it uses off-the-shelf electronic components and 3D printed parts it represents an affordable option anywhere the technology is available [31].
The SSSY-MyHand works with only 3 electric motors. It is comparable to the human hand in weight and is capable of performing most grasps and gestures used every day [33].
● Stiffness Control
The control of the end effector stiffness has been identified as a need, unfortunately the problem is not yet solved by current devices [10]. The following section summarises the current state of the art and advancements regarding the implementation of stiffness control as well as related technologies.
Body powered prosthesis provide inherently uncontrollable end effector stiffness due to the currently used prehensor spring. The body joint, which actuates the effector, can actively control the stiffness in one direction depending on the user input. The resulting stiffness of the end effector is therefore a combination of the prehensor spring stiffness and the current state of the body joint. In myoelectric prosthetic hands the stiffness is not user controlled, but is a function of the implemented end effector velocity control or force control, or a combination of both.[10]
Low end effector stiffness has shown to improve the users perception of the object stiffness in body powered devices[10]. Therefore adaptive fingers with low stiffness have been used[22]for a prosthetic hand. The problem of added stiffness giving confusing feedback to the user has also been addressed by means of negative stiffness for glove stiffness compensation[23].
Stiffness detection is important for adaptive force control. The benefits obtained would be improvements in system response and reduction in oscillatory behaviour [32].
A passive compliant wrist has been introduced in [24]. The authors had observed that rigid wrists in prosthetic arms are the cause of strain injuries in the sound arm, because the users are leaving aside their rigid wrists prosthesis. The control of the stiffness, even if it is just switching from stiff to compliant, is shown to be fundamental in these cases. Another solution to the rigid wrist problem is adding an extra actuator for the wrist activation [25].
Although it is not addressed specifically as stiffness control, a gas powered arm with compliant hand joints: has been proposed in [26]. The passive means of switching between motion and force control without extra sensors or actuators has been proven to be a reliable mechanism [26].
Underactuation and compliance are being exploited for grasping improvement, using the adaptability of the shape of the compliant hand. An underactuated five-fingerhand has been proposed and showed to be an effective techniqueto grasp small, circular and heavy objects. The forces of the action represent a human like force distribution. The simplicity of compliant Joints, in underactuated hands allow to have a design for single actuation source [27]. This means that it can be easily body powered or motor actuated. The COIMBRA 3D printed hand, presents compliant joints as well. It has a bio-inspired design, with soft fingers that can perform 23 of the 33 grasps that humans perform[29].
a. Assessment of the current situation
We found several bodies powered and externally powered devices in TRL 9, but none of them have an active method of controlling the stiffness of the fingers or the grasper.
Technology of body powered devices seems to have been pushed aside by myoelectric devices. Nevertheless, it is important to highlight the needs of the end user of the device and the functional requirements identified in the works reviewed [7]–[9], [34]. One of the desired requirements on a prosthetic hand is the feedback to the user as this enables a higher degree of control over the hand. As part of this we saw various efforts to provide feedback with externally powered devices[35][36][37]. Nevertheless, body powered devices are still outperforming the externally powered ones in this aspect, as they give a natural feedback of the force applied, by the tension applied to the wires controlling it.
In terms of weight, the situation has not changed much in the last years. In 1998 Doshis body powered hand [38] was 203 g. Todays mechatronic devices are within a range of 350 to 615 g in commercial prostheses and 350 to 2,200 g in research-based hands[19]
TABLE 4 - HIGHER TRL DEVICES AND THEIR FUNCTIONALITY

Some records identified by this systematic search were not specifically reporting on hand prosthesis, but provided useful knowledge and methods which can benefit the development of these devices. The relevant information extracted from those records is presented in this section.
It has been detected that the glove used in many anthropomorphic hands, adds some stiffness to the prosthesis. In that sense, when the device is body actuated, this stiffness gives a confusing feedback to the user. The University of Delft has proposed a negative stiffness mechanism in order to compensate for the parasitic glove stiffness [23]. They have proposed a body-actuated design by considering the desired finger force distribution as a starting point. Clamping of the object is one of the most important aspects. "The way the hand moves to grasp an object should be such that it ends up in a good grip." [22]
Normally open hands need a continuous tension to hold an object. The APRL hand, amongst others[39][40], has solved this issue by introducing a locking mechanism. It has a capstan to hold the grasping position on this NO hand[41].
The HYBRID VO-VC hand, presents a mechanical design that allows the user to change the configuration of the hand from Voluntary Opening to Voluntary Closing. It has been observed that VO and VC need to be combined to augment the system capabilities for daily tasks and work related tasks [28].
A nitinolrod is used to control the activation of the fingers in an underactuated hand [17]. It is not used as actuator but as a passive backbone because of its mechanical characteristics. The device uses only one motor for the actuation of the prosthesis.
It has been identified that low stiffness in a prosthetic hand provides a straightforward feedback to the user depending on the grasped object stiffness. Takakiet al.[42] have developed a robotic hand that uses low force to identify an object and then switches to high force to grasp it. This is a functionality that could be implemented in hand prostheses.
As mentioned before, the weight of the prosthesis is a very important characteristic. A way to distribute the weight or apply it to the rigid parts of the human body is Osseointegration. This is an invasive technique in which a titanium structure is attached to the bone to provide a mechanical interface. This way excessive pressure on the amputees skin can be avoided, but as it is a very invasive procedure it can carry complications. [43]
c. Identified requirements
Amongst the devices reviewed in this paper not a single device was identified that would completely meet the userrequirements.
There are several works trying to identify the needs and wishes of the user [7], [8], [34]. Those studies highlight three important aspects: Cosmetics, comfort and control.
Cosmetic requirements are met by the use of special gloves that give a natural look to anthropomorphic prosthesis (basically all of the devices classified under externally powered). Unfortunately, and although they are widely used, split hooks remain quite visually unnatural.
Comfort requirements refer mainly to the weight and holding mechanism. In that sense, myoelectric devices rank lower than body actuated, as the harness used for the body actuated ones allows the redistribution of the weight and contact interface with the prosthesis.
Control requirements are closely related to task specific needs of the user, depending on the individual application in daily life.
These requirements have been expanded after an analysis of the main challenges faced by R&D departments to the date. The challenges identified are: force control, grasping functionality, holding functionality, lightweight, ease of use, cost, maintenance, stiffness control, feedback and aesthetics. A classification of the highest TRL records, showing which challenges have been completed, is shown in Table 4.
6. CONCLUSIONS
Body powered prosthesis are preferred to myoelectric devices due to their associated cost, simplicity of use but most of all, because they provide a natural feedback to the user [8].
Stiffness control or at least regulation has been identified as a need but has not being fully covered, even disregarded [10].Stiffness of human fingers has been analysed by experiments which led into models [44]. This work can be beneficial for future work on variable stiffness end effectors.
More work needs to be done on body powered prosthesis, as they seem to be the preferred ones in terms of functionality, cost and ease of use.
7. ACKNOWLEDGEMENT
This review has been done within the Variable stiffness prosthetic grasper project, funded by the Robotics and Automation Society (RAS) Special Interests Group on Humanitarian Technology (SIGHT) from The Institute of Electrical and Electronic Engineers (IEEE).
8. REFERENCES
[1] Instituto Nacional de Estadistica, Resultados del CENSO 2012, 2012. [ Links ]
[2] M. de S. de Bolivia, Sistema de Información del Programa de Registro Único Nacional de la Persona con Discapacidad - Misión Solidaria Moto Méndez, 2010. [ Links ]
[3] E. P. de B. Ministero de Justicia, Informe de la convencion sobre los derechos de las personas con discapacidad, 2013.
[4] P. G. Weyand, M. W. Bundl, C. P. McGowan, A. Grabowski, M. B. Brown, R. Kram, and H. Herr, The fastest runner on artificial legs: different limbs, similar function?, J. Appl. Physiol., vol. 107, no. 3, pp. 903–911, 2009.
[5] S. Raspopovic and E. Al, Restoring Natural Sensory Feedback in Real-Time Bidirectional Hand Prostheses, Sci. Transl. Med., vol. 6, no. 222, p. 2/22ra19, 2014.
[6] E. A. Bidiss and T. T. Chau, Upper limb prosthesis use and abandonment: A survey of the last 25 years, Prosthet. Orthot. Int., vol. 31, no. 3, pp. 236–257, 2007.
[7] E. Biddiss and T. Chau, Upper-limb prosthetics: critical factors in device abandonment., Am. J. Phys. Med. Rehabil., vol. 86, no. 12, pp. 977–987, Dec. 2007.
[8] E. Biddiss, D. Beaton, and T. Chau, Consumer design priorities for upper limb prosthetics., Disabil. Rehabil. Assist. Technol., vol. 2, no. 6, pp. 346–357, Nov. 2007.
[9] A. L. Muilenburg and M. A. LeBlanc, Body-powered upper-limb components, in Comprehensive management of the upper-limb amputee, Springer, 1989, pp. 28–38.
[10] A. Filatov and O. Celik, Effects of body-powered prosthesis prehensor stiffness on performance in an object stiffness discrimination task, 2015 IEEE World Haptics Conference (WHC). pp. 339–344, 2015.
[11] L. J. Love, R. F. Lind, and J. F. Jansen, Mesofluidic actuation for articulated finger and hand prosthetics, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 2586–2591, 2009.
[12] D. Moher, A. Liberati, J. Tetzlaff, D. G. Altman, and P. Group, Preferred reporting items for systematic reviews and meta-analyses: the PRISMA statement, PLoS med, vol. 6, no. 7, p. e1000097, 2009.
[13] ASDRE, Technology Readiness Assessment ( TRA ) Guidance, US Dep. Defense, Assitant Secr. Def. Res. Eng., no. May, pp. 1–20, 2011.
[14] M. Baril, T. Laliberté, C. Gosselin, and F. Routhier, On the Design of a Mechanically Programmable Underactuated Anthropomorphic Prosthetic Gripper, J. Mech. Des., vol. 135, no. 12, pp. 121008–121009, Oct. 2013.
[15] T. Laliberté, L. Birglen, and C. Gosselin, Underactuation in robotic grasping hands, Mach. Intell. Robot. Control, vol. 4, no. 3, pp. 1–11, 2002.
[16] T. Lalibert, M. Baril, F. Guay, and C. Gosselin, Towards the design of a prosthetic underactuated hand, 2010.
[17] K. Xu, H. Liu, Z. Liu, Y. Du, and X. Zhu, A single-actuator prosthetic hand using a continuum differential mechanism, 2015 IEEE International Conference on Robotics and Automation (ICRA). pp. 6457–6462, 2015.
[18] Touch Bionics, No Title. [Online]. Available: http://www.touchbionics.com/products/how-i-limb-works.
[19] J. T. Belter, J. L. Segil, A. M. Dollar, and R. F. Weir, Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review., J. Rehabil. Res. Dev., vol. 50, no. 5, pp. 599–618, 2013.
[20] G. Smit, D. H. Plettenburg, and F. C. T. van der Helm, The lightweight Delft Cylinder Hand: first multi-articulating hand that meets the basic user requirements., IEEE Trans. Neural Syst. Rehabil. Eng., vol. 23, no. 3, pp. 431–440, May 2015.
[21] B. Peerdeman, G. Smit, S. Stramigioli, D. Plettenburg, and S. Misra, Evaluation of pneumatic cylinder actuators for hand prostheses, 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob). pp. 1104–1109, 2012.
[22] H. de Visser and J. L. Herder, Force-directed design of a voluntary closing hand prosthesis., J. Rehabil. Res. Dev., vol. 37, no. 3, pp. 261–271, 2000.
[23] N. Tolou, G. Smit, A. A. Nikooyan, D. H. Plettenburg, and J. L. Herder, Stiffness Compensation Mechanism for Body Powered Hand Prostheses with Cosmetic Covering, J. Med. Device., vol. 6, no. 1, pp. 11004–11005, Mar. 2012.
[24] F. Montagnani, M. Controzzi, and C. Cipriani, Preliminary design and development of a two degrees of freedom passive compliant prosthetic wrist with switchable stiffness, 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO). pp. 310–315, 2013.
[25] E. Anderson, J. Moloughney, K. Ozerinsky, and R. Saleh, Body powered anthropomorphic prosthetic hand with force feedback and auto-rotation regimes, 2012 38th Annual Northeast Bioengineering Conference (NEBEC). pp. 33–34, 2012.
[26] K. B. Fite, T. J. Withrow, X. Shen, K. W. Wait, J. E. Mitchell, and M. Goldfarb, A Gas-Actuated Anthropomorphic Prosthesis for Transhumeral Amputees, IEEE Transactions on Robotics, vol. 24, no. 1. pp. 159–169, 2008.
[27] Y. Kamikawa and T. Maeno, Underactuated five-finger prosthetic hand inspired by grasping force distribution of humans, 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 717–722, 2008.
[28] T. Sullivan and K. S. Teh, Design and Fabrication of a Hybrid Body-Powered Prosthetic Hand With Voluntary Opening and Voluntary Closing Capabilities, no. 54884. pp. 155–162, 2011.
[29] M. Tavakoli, J. Lourenço, and A. T. de Almeida, 3D printed endoskeleton with a soft skin for upper-limb body actuated prosthesis, 2017 IEEE 5th Portuguese Meeting on Bioengineering (ENBENG). pp. 1–5, 2017.
[30] T. E. Wiste, S. A. Dalley, T. J. Withrow, and M. Goldfarb, Design of a multifunctional anthropomorphic prosthetic hand with extrinsic actuation, 2009 IEEE International Conference on Rehabilitation Robotics. pp. 675–681, 2009.
[31] P. Slade, A. Akhtar, M. Nguyen, and T. Bretl, Tact: Design and performance of an open-source, affordable, myoelectric prosthetic hand, 2015 IEEE International Conference on Robotics and Automation (ICRA). pp. 6451–6456, 2015.
[32] R. Andrecioli and E. D. Engeberg, Grasped object stiffness detection for adaptive force control of a prosthetic hand, 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics. pp. 197–202, 2010.
[33] M. Controzzi, F. Clemente, D. Barone, A. Ghionzoli, and C. Cipriani, The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis., IEEE Trans. Neural Syst. Rehabil. Eng., Jun. 2016.
[34] D. H. Plettenburg, Basic requirements for upper extremity prostheses: the WILMER approach, Proceedings of the 20th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. Vol.20 Biomedical Engineering Towards the Year 2000 and Beyond (Cat. No.98CH36286), vol. 5. pp. 2276–2281 vol.5, 1998.
[35] E. R. Mancipe-Toloza and S. A. Salinas, Force control and haptic interface applied to prototype of myoelectric prosthetic hand, 2015 Pan American Health Care Exchanges (PAHCE). pp. 1–5, 2015.
[36] H. J. B. Witteveen, F. Luft, J. S. Rietman, and P. H. Veltink, Stiffness Feedback for Myoelectric Forearm Prostheses Using Vibrotactile Stimulation., IEEE Trans. Neural Syst. Rehabil. Eng., vol. 22, no. 1, pp. 53–61, Jan. 2014.
[37] J. Gonzalez, H. Suzuki, N. Natsumi, M. Sekine, and W. Yu, Auditory display as a prosthetic hand sensory feedback for reaching and grasping tasks., Conf. Proc. ... Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Conf., vol. 2012, pp. 1789–1792, 2012.
[38] R. Doshi, C. Yeh, and M. LeBlanc, The design and development of a gloveless endoskeletal prosthetic hand., J. Rehabil. Res. Dev., vol. 35, no. 4, pp. 388–395, Oct. 1998.
[39] R. Leeb, M. Gubler, M. Tavella, H. Miller, and J. d. R. Millán, On the road to a neuroprosthetic hand: A novel hand grasp orthosis based on functional electrical stimulation, 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology. pp. 146–149, 2010.
[40] K. D. Gemmell, M. T. Leddy, J. T. Belter, and A. M. Dollar, Investigation of a passive capstan based grasp enhancement feature in a voluntary-closing prosthetic terminal device., Conf. Proc. ... Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Conf., vol. 2016, pp. 5019–5025, Aug. 2016.
[41] K. D. Gemmell, M. T. Leddy, J. T. Belter, and A. M. Dollar, Investigation of a passive capstan based grasp enhancement feature in a voluntary-closing prosthetic terminal device., Conf. Proc. ... Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol. Soc. Annu. Conf., vol. 2016, pp. 5019–5025, Aug. 2016.
[42] T. Takaki and T. Omata, High-Performance Anthropomorphic Robot Hand With Grasping-Force-Magnification Mechanism, IEEE/ASME Transactions on Mechatronics, vol. 16, no. 3. pp. 583–591, 2011.
[43] J. Tillander, K. Hagberg, L. Hagberg, and R. Brånemark, Osseointegrated Titanium Implants for Limb Prostheses Attachments: Infectious Complications, Clin. Orthop. Relat. Res., vol. 468, no. 10, pp. 2781–2788, 2010.
[44] A. E. Fiorilla, F. Nori, L. Masia, and G. Sandini, Finger impedance evaluation by means of hand exoskeleton., Ann. Biomed. Eng., vol. 39, no. 12, pp. 2945–2954, Dec. 2011.

