











 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1 Introducción
Durante las últimas décadas, la robótica ha jugado un papel muy importante en la automatización de procesos, con manipuladores robóticos asumiendo un papel protagónico en el desarrollo de diversos procesos productivos. Hoy en día los robots SCARA están siendo utilizados en la industria automotriz, eléctrica, electrónica y manufacturera por su alta velocidad, tiempo de ciclo corto, control avanzado para la precisión de trayectoria y por su alta flexibilidad, destreza y productividad, (Mohan, 2016). Otra consideración importante en el estudio de Manipuladores robóticos es el análisis cinemático y dinámico, ya que estos permiten posicionar el robot en un punto dentro de su espacio de trabajo, el cual se fundamenta bajo formulaciones matemáticas el comportamiento del movimiento del brazo; tales ecuaciones son útiles para la simulación en computadora del movimiento del robot, el diseño de leyes de control apropiadas para el robot, la evaluación del diseño y estructura del robot. En base a lo mencionado, este trabajo presenta el modelado y simulación de un robot SCARA de 3 grados de libertad, utilizando dos plataformas la de Matlab/Simulink® y SolidWorks, basado en la compatibilidad de ambos mediante el complemento Simscape Multibody, que permite realizar las estructuras de simulación tanto para el modelo CAD, como para el modelo de Euler Lagrange, de manera que se puedan establecer comparaciones. Estas estructuras de simulación contienen el modelo cinemático, las trayectorias, así como el modelo CAD. Todos los aspectos mencionados son presentados en detalle a continuación.
2 Robótica en Bolivia
En el ámbito académico, (Triveño, 2014) afirma que el primer curso de maestría en automatización y control en Bolivia se llevó adelante entre 1998 y 2000 en la ciudad de Cochabamba, del cual aproximadamente 10 ingenieros fueron graduados como magísteres. Paralelamente el año de 2000 fue llevado adelante el primer curso de robótica industrial en la universidad Católica Boliviana Filial Cochabamba, donde dos años más tarde se defendía el primer trabajo de graduación producido en Bolivia en esta misma universidad. Entre el 2002 y el 2010 no se tiene registro de trabajos o cursos de maestría en el país. Luego en 2010 entro en auge la robótica educativa con los primeros cursos en la ciudad de La Paz, también fueron abiertas las carreras de mecatrónica y electromecánica en algunas universidades del país. En 2015 se da inicio a la segunda versión de la maestría en automatización y control con 20 alumnos de los cuales 4 alumnos se gradúan como magísteres en el área de robótica el 2020. El 2022 se da inicio a la tercera versión de la maestría en robótica. Finalmente, hoy en día ya están siendo puestos en funcionamiento los primeros robots industriales en las industrias de La Paz, Cochabamba y Santa Cruz lo que permitirá la modernización del pequeño polo industrial que tiene el país.
3 Cinemática del Robot
La cinemática de manipuladores involucra el estudio y la descripción analítica de la geometría y propiedades de movimiento basado en el tiempo, con respecto a un sistema de coordenadas fijo y sin tener en cuenta las fuerzas que generan el movimiento (Alvarez S. & Cruz, 2020), (Spong, 2020).
3.1 Cinemática directa
Para describir el robot SCARA en términos geométricos y realizar el análisis matemático de manera sistematizada se hace uso de la notación de Denavit- Hartenberg D-H. Para la cinemática directa en cuestión, se consideran 3 articulaciones y 3 eslabones, donde a cada par articulación-eslabón se la asigna un grado de libertad y en cada articulación se establece un sistema de referencia (ver Figura 1).
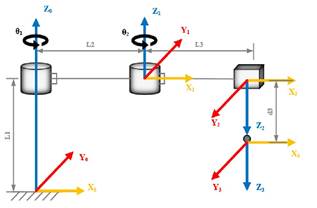
Los cilindros representan el movimiento rotacional que se tiene entre eslabones, es decir representan las variables articulares q1 y q2 y el cubo indica el desplazamiento prismático del eslabón final, lo que corresponde a la tercera variable articular q3. Asimismo, L1, L2 y L3 son las longitudes de los eslabones.
Cada uno de los sistemas de coordenadas se define a partir del sistema de coordenadas anterior y de los ejes de articulación, siguiendo los pasos descritos de la convención D-H, son determinados los parámetros presentados en la Tabla 1.
Tabla 1. Parámetros D-H
| Articulación | Z | X | q | ||
| θi | di | ai | αi | ||
| 1 | q1 | L1 | L2 | 0 | θ1 |
| 2 | q2 | 0 | L3 | 180° | θ2 |
| 3 | 0 | q3 | 0 | 0 | d3 |
Los parámetros de cada elemento, presentados en la Tabla 1, son sustituidos en la matriz de transformación homogénea de D-H mostrada en la Ecuación 1.

De esta manera se obtienen las matrices homogéneas para cada articulación, dadas por las Ecuaciones 2, 3 y 4.



Una vez obtenidas las matrices homogéneas, la convención de D-H indica que la cinemática directa para todo el sistema se obtiene de la multiplicación de las matrices 2, 3 y 4 que relaciona la base del robot con el elemento final, de esta manera se obtiene la Ecuación 5:

Desarrollando el producto de las matrices de transformación es obtenido:

Por simplificación en la escritura de los elementos de las matrices se adopta la siguiente nomenclatura:

Finalmente, reemplazando la nomenclatura adoptada en la matriz de la Ecuación 6, las coordenadas de posición del efector final con respecto a la base para el robot SCARA de tres grados de libertad son:




3.2 Cinemática Inversa
La cinemática inversa consiste en obtener las variables articulares a partir del conocimiento de la posición del elemento final del manipulador. El método empleado es el método geométrico que por su simplicidad resulta práctico para pocos grados de libertad, para ello se usa relaciones geométricas y trigonométricas sobre cada uno de los elementos del robot (ver Figura 2).
De la Figura 2, se establece que la componente vertical Pz, depende de la articulación prismática del tercer grado de libertad, es decir:

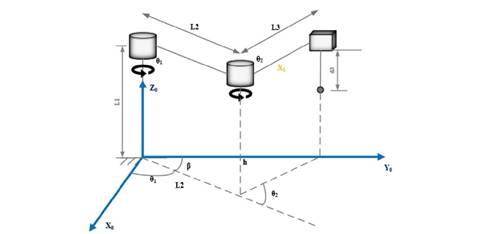
Se considera el análisis del movimiento en el plano para los primeros dos grados de libertad, proyectando el robot SCARA sobre el plano x 0 -y 0 , como ilustrado en la Figura 3.
Dada la configuración de la Figura 3, se tiene las siguientes relaciones geométricas:

Aplicando el teorema del coseno en los elementos 2 y 3 de la Figura 3, es obtenido:



Aplicando las identidades trigonométricas dadas por las ecuaciones 16 y 17.


Se aplican las ecuaciones 16 y 17, en la ecuación 14, de esta manera se obtiene:


También de la Figura 4 se obtiene:

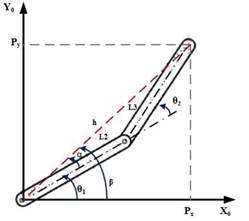
Debido a su estructura plana, el valor del ángulo β, se obtiene de la relación de Px y Py, tal que:

Aplicando identidades geométricas para hallar el valor del ángulo α, para posteriormente calcular θ2.


Finalmente, la solución del problema cinemático inverso para el robot SCARA está dado por:



4 Modelo dinámico de Euler-Lagrange
El modelo dinámico de un robot manipulador de “n” grados de libertad compuesto de eslabones rígidos interconectados por uniones libres de fricción y elasticidad está dado por (Dechrit, 2018):

donde:
q = Vector de posiciones articulares o coordenadas generalizadas.
˙q = Vector de velocidades articulares.
¨q = Vector de aceleraciones articulares.
M(q) = Matriz de inercia que representa el cambio de estado de movimiento.
C(q,˙q) = Matriz de fuerzas centrípetas y de Coriolis.
g(q) = Vector de fuerzas o pares gravitacionales obtenido como el gradiente de la energía potencial.
τ = Vector de pares aplicados al robot.
Para determinar el modelo dinámico del robot SCARA de 3 grados de libertad, se emplea el método de Euler-Lagrange, basado en el balance de la energía cinética y potencial. De acuerdo al método de Euler-Lagrange las ecuaciones de movimiento que gobiernan a un robot rígido de “n” grados de libertad están determinadas por:

Donde
es el lagrangiano, que viene dado por:

Donde K y P son la energía cinética total y la energía potencial total, respectivamente. De esta forma la dinámica de un robot SCARA de 3 grados de libertad, donde m representa la masa de los eslabones, L la longitud e I representa la inercia de los componentes es dada por (Salman et. al, 2012).










M(q) es la matriz de inercia.
La matriz C (q, ˙q) llamada matriz de fuerzas centrípetas y de Coriolis, que representa las velocidades de las articulaciones, es obtenida a través de los coeficientes o símbolos de Christoffel, das por:









El efecto de la gravedad en el desplazamiento vertical para el par τ3, es dado por:



Finalmente, las ecuaciones matriciales que permiten conocer el comportamiento del robot, son dadas por:

5 Modelado de la estructura mecánica
El desarrollo de la estructura mecánica corresponde a la selección de la forma de los elementos que componen su estructura, materiales, la obtención de las propiedades dinámicas (masas, centros de masas, inercias, etc.) estimación de cargas y evaluación de esfuerzos en elementos críticos (Bordallo,2016), (Heras,2015), (Yousif and Safwan, 2015), (Olier, 1999). Para esto son considerados los siguientes parámetros que permiten modelar el robot SCARA mediante la herramienta de Solidworks, (ver Tabla 2).
Tabla 2. Parámetros de estudio del robot SCARA
| Articulación | Tipo de articulación | Variable | Rango de giro/ desplazamiento | Longitud de los eslabones | Rango de velocidades |
|---|---|---|---|---|---|
| 1 | Rotacional | θ1 | Entre -125° y + 125° | 200 mm | 30 º/s |
| 2 | Rotacional | θ2 | Entre -145° y + 145° | 250 mm | 30 º/s |
| 3 | Rotacional | d3 | 200 mm | 200 mm | 8 cm/s |
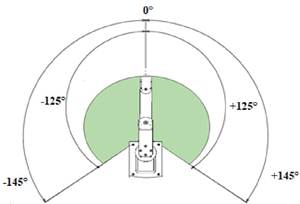
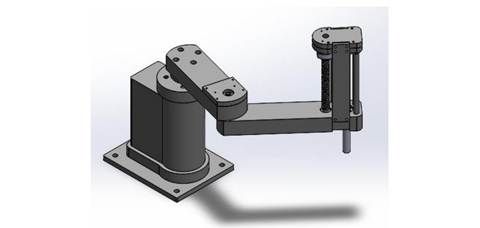
Con el espacio de trabajo definido para cada articulación, tal como se aprecia en la Figura 4 y las dimensiones establecidas se realiza el modelado de la estructura mecánica del robot SCARA en SolidWorks, como se aprecia en la Figura 5. Asimismo, se establece la asignación de materiales para cada pieza donde la base es asignada por el material Acero AISI 1020, y para los eslabones el material asignado es el Aluminio-Aleación 1060.
De forma complementaria se desarrolla un análisis estructural estático a cada pieza, en función del material asignado y las dimensiones planteadas, en base a los siguientes diagramas de cuerpo libre (ver Figura 6).
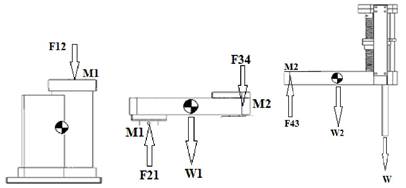
Teniendo en cuenta los DCL de cada pieza y los valores de las propiedades físicas del robot SCARA, tal como presentado en la Tabla 3, se establece que el peso de cada pieza queda definido como:



Tabla 3. Propiedades físicas del robot SCARA
| Propiedad física | Valor |
|---|---|
| Momento de Inercia 1 | 1147.7842256394163 /1e6 [kg*m2] |
| Momento de Inercia 2 | 11823.563264481743/1e6 [kg*m2] |
| Momento de Inercia 3 | 239.59265555381532/1e6 [kg*m2] |
| Centro de Masa 1 | 0.1-42.376007632210964/1e3 [m] |
| Centro de Masa 2 | 0.125-16.522222322673251/1e3 [m] |
| Masa 1 | 1.55 [kg] |
| Masa 2 | 2 [kg] |
| Masa 3 | 0.095 [kg] |
Con el los pesos de los eslabones, es efectuado el siguiente análisis:



5.1 Simulación y análisis de esfuerzos
Para realizar el análisis de cargas y esfuerzos bajo condiciones estáticas en los componentes de la estructura mecánica del robot SCARA, se utiliza SolidWorks con el complemento SolidWorks Simulation, mediante los análisis de desplazamiento estático y el análisis de tensión Von Mises para cada pieza respectivamente, como se muestran en las Figuras 6, 7 y 8. Estos análisis permiten encontrar las deflexiones que pueden ocurrir en cada uno de los eslabones, definir si son significativas y ver cómo afectarían en el funcionamiento del robot.
La primera pieza de la estructura mecánica es la base, con un material asignado de acero AISI 1020, se toma en cuenta el DCL de la Figura 6, donde F12 es aplicada a la parte superior de la base (44.64 N). De esta manera se genera de forma gráfica y codificada en colores las zonas más vulnerables, siendo el tono azul como límite mínimo y rojo como límite máximo, como se observa en la Figura 7.
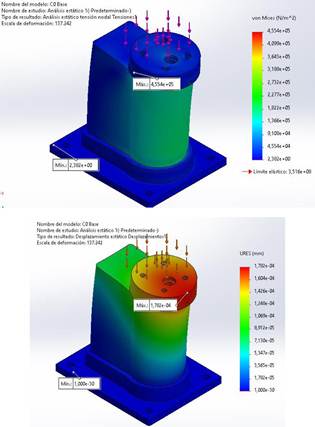
En la Figura 8, se observa que la pieza no supera su límite elástico, considerando que esta pieza es de material de aleación de aluminio, el valor máximo se presenta en la unión del eslabón 1 y la base.
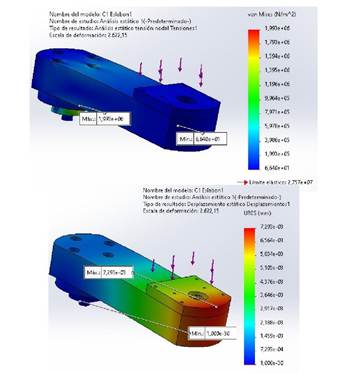
En la Figura 9 se observa, que el componente del eslabón 2 no rompe el límite elástico del material siendo su valor máximo de 2.151*106 [N/mm2], que se encuentra por debajo del límite elástico de la aleación de aluminio.
Del análisis estructural se verifica que el material seleccionado cumple con las exigencias generadas tanto para la base como para los eslabones, donde el valor máximo no excede del valor admisible del material.
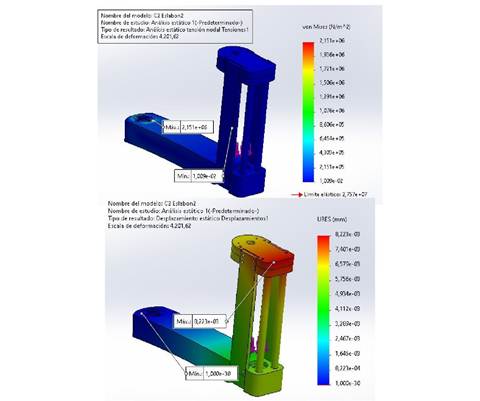
Figura 9: Análisis estructural del eslabón 2
6 Ambiente MATLAB/SIMULINK ®- SOLIDWORKS
La estructura de simulación del robot SCARA se establece mediante un complemento en común que posee SolidWorks y Matlab/Simulink® (Simscape Multibody), para una correcta exportación del archivo de SolidWorks se sintetiza la cantidad de piezas, relaciones de posición u otros. Al realizar la importación al entorno de Matlab/Simulink se generan bloques que representan los cuerpos sólidos de la estructura mecánica y las articulaciones del robot SCARA, como se ilustra en la Figura 10.

7 Algoritmos implementados
Dentro de este mismo ambiente mediante usando el bloque s-function, se generan los diferentes subsistemas necesarios para la simulación.
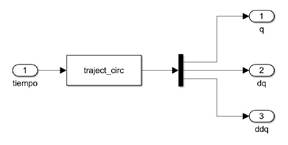
Fue desarrollado un algoritmo para generar movimiento en el robot SCARA, específicamente una trayectoria circular. La Figura 11 hace referencia al subsistema que contiene la trayectoria circular del robot SCARA.
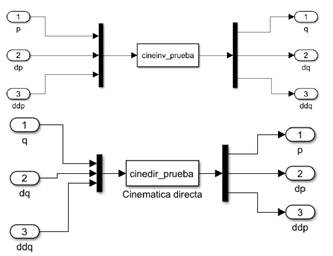
Los algoritmos de la cinemática, se desarrollan en función de las ecuaciones presentadas en la sección 4. La Figura 12 ilustra los subsistemas de la cinemática del robot SCARA.
Se desarrolla un algoritmo para la implementación de la dinámica del robot SCARA, en este algoritmo se incluyen las matrices correspondientes al método de Euler Lagrange, donde los valores de las propiedades físicas son proporcionados por la Tabla 3.
Este algoritmo es utilizado exclusivamente para la estructura del modelo matricial de Euler Lagrange (ver Figura 13).

8 Algoritmo de Control
El controlador PD considera una matriz de ganancia Kp (parte proporcional) y una matriz Kd (parte derivativa), ver Figura 14.
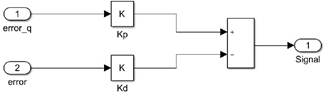
El controlador PD permite que el robot siga adecuadamente la trayectoria implementada. El controlador PD calcula la diferencia entre la variable real y la variable deseada.
9 Implementación de actuadores
Para completar la estructura de simulación es necesaria la implementación de actuadores para cada articulación, considerando que la variable de entrada hacia la estructura del robot para que exista movimiento es el “torque”, se implementan 3 actuadores como se observa en la Figura 15.
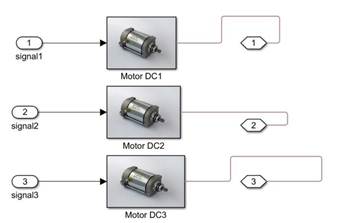
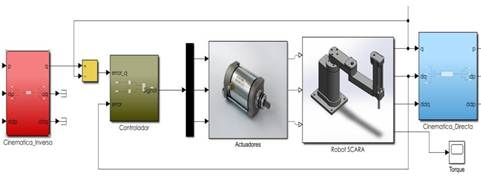
Cada actuador cuenta con una estructura dada por la librería de Simscape Multibody, la selección es detallada en la sección 12 de este trabajo. Finalmente, la estructura completa de simulación con todos los subsistemas mencionados es ilustrada en la Figura 16.
10 Estructura de simulación del modelo CAD
La estructura de simulación del modelo CAD representada dentro del entorno de Matlab/Simulink, es ilustrada en la Figura 17. Una característica propia de la estructura de simulación del modelo CAD, es la inclusión de la dinámica del robot mediante la estructura CAD importada de SolidWorks.
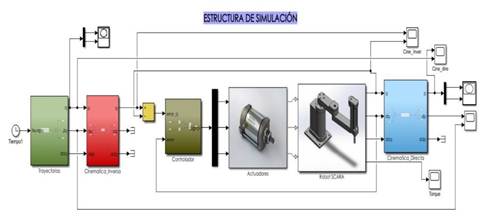
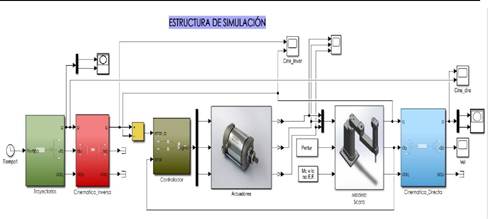
11 Estructura de simulación del modelo matricial de Euler-Lagrange.
La diferencia que existe es la inclusión del bloque de la dinámica del robot SCARA, que en este caso contiene la dinámica formulada bajo el método de Euler Lagrange (ver Figura 18).
12 Selección de actuadores
El desarrollo de estos actuadores eléctricos se realiza mediante el interfaz de Matlab-Simulink y con el complemento de Simscape Multibody el cual proporciona una sección de librerías apropiadas para seleccionar y modelar un motor DC adecuado.
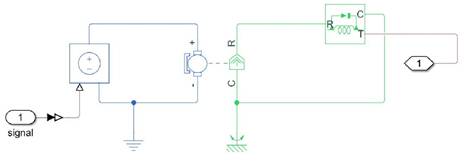
El actuador seleccionado y desarrollado ilustrado en la Figura 19, es utilizado para las articulaciones rotacionales.
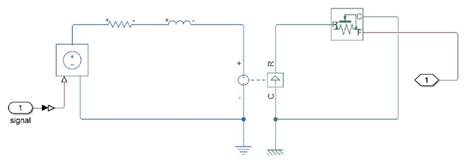
Para la articulación prismática es necesario un actuador de tipo traslacional, por lo que se añaden a la base inicial un convertidor electromecánico rotacional y un sensor de fuerza ideal, ver Figura 20.
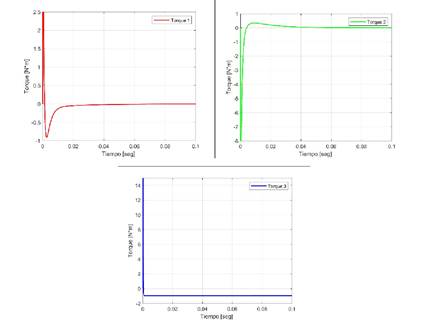
Estos actuadores seleccionados, generan los valores de los torques para cada articulación y modelo desarrollado. La Figura 21 representa los torques generados para cada articulación, en el modelo CAD.
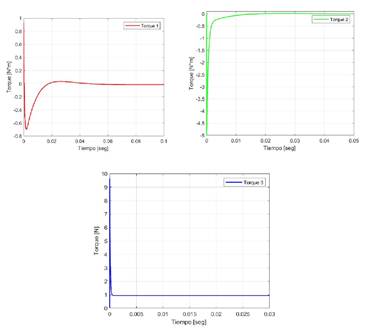
Las torques generadas para el modelo Euler Lagrange, son ilustrados en la Figura 22.
13 Resultados obtenidos
La Figura 23 presenta la trayectoria real y de referencia para el modelo dinámico de cada una de las estructuras de simulación presentadas.
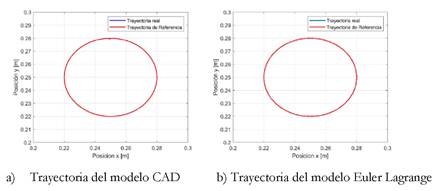
Ambas estructuras siguen de manera correcta la trayectoria implementada. Así mismo, las estructuras de simulación generan las posiciones cartesianas del robot SCARA, como se aprecia en las Figuras 24 y 25.
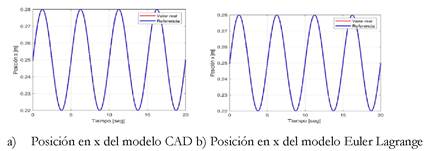
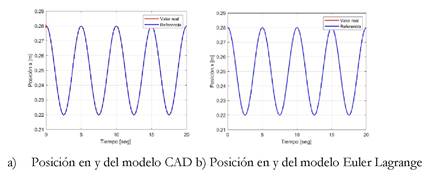
Las Figuras 24 y 25, muestran coincidencia entre los valores reales y de referencia para cada modelo.
Los resultados de las posiciones articulares reales y de referencia son ilustrados en las Figuras 26 y 27.
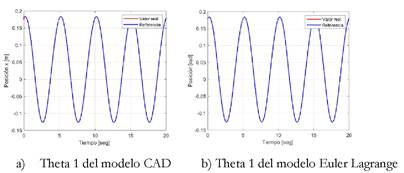
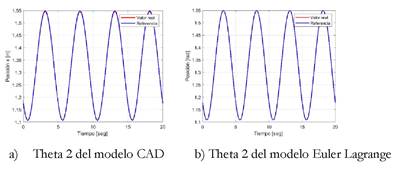
La Figura 26 y 27, presentan una similitud correspondiente entre los valores reales y de referencia para cada modelo.
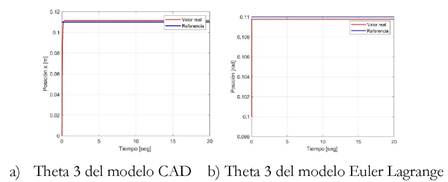
Finalmente, la Figura 28, presenta los resultados obtenidos para la tercera articulación. Se verifica una ligera desviación al momento de coincidir entre ambos valores, que no representa cambios bruscos que afecte la precisión y posicionamiento del robot (esta desviación es producida por las condiciones iniciales predeterminadas).
14 Conclusiones
Este trabajo presenta el estudio del modelo matemático completo del robot SCARA (cinemática inversa, directa y modelo dinámico). Asimismo, el modelado de la estructura mecánica del robot SCARA se realiza mediante la herramienta de SolidWorks, el cual incluye el análisis estructural bajo condiciones estáticas y la correcta asignación de material para cada componente, de esta manera establecer propiedades físicas correctas para el robot SCARA. Mediante las librerías del complemento de Matlab se desarrolla y selecciona los actuadores necesarios para el movimiento del robot.
La construcción de la estructura de simulación del modelo CAD y del modelo de Euler Lagrange, abarca la cinemática, dinámica, trayectorias, controlador y actuadores. Asimismo, la modelación y simulación utilizando SolidWorks y Matlab/Simulink® mediante el complemento de Simscape Multibody permite visualizar el modelo en un mecanismo 3D, de esta forma poder observar constantemente los cambios que se realizan. Los resultados de simulación tanto para la trayectoria y posiciones presentan resultados semejantes y aceptables en cuestión de valores de referencia y valores reales para cada modelo.
Finalmente, se puede concluir que el uso de SolidWorks mediante el modelo CAD, representa una alternativa correcta y útil para la visualización y representación del modelo dinámico del robot SCARA, facilitando la modificación y adición de valores preestablecidos de las características dinámicas o mecánicas del robot, lo que conlleva a crear y probar trayectorias para tareas específicas, evitando que el usuario tenga problemas a la hora de implementar las matrices de un robot de “n” grados de libertad en forma matricial. Los resultados presentados subrayan que los sistemas de robot independientemente de su complejidad y dimensiones pueden ser modelados, simulados, analizados y optimizados lo que lleva a buenos resultados antes de la construcción de un prototipo.

