










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkActa Nova
On-line version ISSN 1683-0789
RevActaNova. vol.8 no.2 Cochabamba Sept. 2017
ARTÍCULO CIENTÍFICO
Sistema de detección y monitoreo permanente por imagen de incendios y contaminación atmosférica en la ciudad de Cochabamba
Detection system and permanent monitoring by image of fires and air pollution in the city of Cochabamba
Santiago M. Mejía U., Willman García F., Bruschetta F.
Departamento de Ciencias Exactas e Ingeniería, Carrera de Ingeniería de Telecomunicaciones, Universidad Católica Boliviana San Pablo, Calle M. Marques esq. Parque J. Trigo A., Cochabamba
Recibido: 22 de julio 2017
Aceptado: 15 de septiembre 2017
Resumen: Este trabajo demuestra la factibilidad de utilizar un sistema de detección y monitoreo permanente en tiempo real de los incendios y de la contaminación atmosférica en Cochabamba en base a un análisis de imagen. Utilizando componentes electrónicos de bajo costo y un procesamiento de imagen adecuado, es posible detectar incendios en tiempo real con un porcentaje de eficiencia importante, al mismo tiempo de analizar la imagen en busca de sectores contaminados y correlacionar los datos para obtener una aproximación del nivel de contaminación a través de la fotografía digital. Los porcentajes de eficiencia en la detección de incendios en distancias hasta 1.5 km oscilan entre el 60% y 85%, hasta 3 km entre el 50% y 70%, y hasta 4 km entre el 40% y 60%; la mayoría de los errores de detección están relacionados a los errores de luz y a los focos de incendio pequeños. De acuerdo a la topografía del terreno puede incrementar la cantidad de errores de luz si en la imagen existe una sección importante de tierra plana, que refleje claramente el paso de las nubes. Los resultados de la detección de smog muestran que el nivel de contaminación es observable dentro de la altura de la capa de mezcla, con una marcada tendencia al color gris en el rango 170 (escala de 0 a 255). La variedad de implementación de cámaras que puedan ser compatibles con la placa Raspberry Pi brinda la oportunidad de mejorar los porcentajes de eficiencia.
Palabras clave: incendios, contaminación atmosférica, detección, monitoreo, tiempo real.
Abstract: This work demonstrates the feasibility of using a system of real time detection and monitoring of fires and air pollution in Cochabamba based on an image analysis. Using low cost electronic components and adequate image processing, it is possible to detect fires in real time with a high efficiency percentage, while analyzing the image for contaminated sectors and correlating the data permits to obtain an approximation of the level of Pollution through digital photography.
The percentages of fire detection efficiency at distances up to 1.5 km is in the range from 60% to 85%, up to 3 km from 50% to 70%, and up to 4 km from 40% to 60%; most of detection errors is related to light errors and to small fire pockets. According to the terrain topography the amount of light errors can increase if there is an important section of flat earth in the image, which clearly reflects the passage of clouds.
The smog detection results show that the level of contamination is observable within the height of the blend layer, with a marked gray tendency in the range of 170 (scale 0 to 255).
The variety of camera implementations that may be compatible with the Raspberry Pi plate provides the opportunity to improve efficiency percentages.
Keywords: fire, air pollution, detection, monitoring, real-time.
1. Introducción
La ciudad de Cochabamba constituye un valle cerrado por la Cordillera Oriental del Tunari y las serranías de San Pedro y San Miguel, y posee una población de 630 587 habitantes (6). Según el último estudio de la Unidad de Movilidad Urbana del municipio de Cercado en Cochabamba, existe un automóvil por cada ocho personas y sólo en el municipio de Cercado circulan 149.376 vehículos (1). Las emisiones que producen estos vehículos, junto con la contaminación que producen las fábricas e industrias y la situación geográfica, son la mayor causa de contaminación atmosférica, según el informe de la red MoniCA (Red de Monitoreo de Calidad del Aire) correspondiente a la gestión 2014-2015 (2).
La zona sur de la ciudad de Cochabamba es la más afectada según las mediciones realizadas por la red MoniCA, donde la polución alcanzó los 170 µg/m3 (PM10) el 2015, cuando el límite establecido por la OMS (Organización Mundial de Salud) es de 50 µg/m3. Los niveles de contaminación implican serios problemas de salud, en especial para los grupos de riesgo (menores a 5 años y mayores a 60 años) (3).
Según la OMS la contaminación atmosférica urbana aumenta el riesgo de padecer enfermedades respiratorias agudas como la neumonía y crónicas como el cáncer de pulmón y enfermedades cardiovasculares. Se calcula que en el mundo 1.3 millones de personas mueren cada año a causa de la contaminación atmosférica urbana. Esta contaminación aumenta la emisión de gases de efecto invernadero y otros contaminantes que contribuyen al cambio climático (4).
Según un estudio realizado por SwissContact, el 70% de la contaminación atmosférica en Cochabamba proviene del parque automotor, principalmente por la falta de un adecuado mantenimiento vehicular, la antigüedad de los vehículos y la ampliación desmesurada del parque automotor (3).
Existe actualmente en Bolivia una ley destinada a la protección del medio ambiente, la ley 1333, que en su capítulo IV trata el aire y la atmósfera. Esta ley se aprobó el 27 de abril de 1992 pero hasta la fecha su cumplimiento no da abasto al problema de contaminación atmosférica. Según un informe de la red MoniCA correspondiente a la gestión 2014-2015, más del 90% de las mediciones superan el límite máximo permisible establecido (50 µg/m3) por la NB 6201 (Norma Boliviana NB 62011:2008, Calidad del aire - Contaminantes criterio exterior - Límites máximos permisibles del Instituto Boliviano de Normalización y Calidad (IBNORCA)), y más del 30% de ellas superan el límite máximo permisible establecido por la Ley 1333 (150 µg/m3) (2).
En la actualidad los sistemas utilizados miden la contaminación a través de sensores que detectan la composición química del aire, pero estos sistemas no permiten la detección de las áreas específicas que más contribuyen a la contaminación, ni tampoco visualizar el desplazamiento de la nube contaminada para determinar cuáles son las áreas más vulnerables a los efectos de la contaminación atmosférica.
Según la Unidad de Cambio Climático Riesgos y Desastres de la gobernación de Cochabamba (UCCRyD), los incendios forestales ocurridos en los últimos cuatro años en la cordillera del Tunari reportan los siguientes datos: periodo 2013, 56 incendios con 1018 hectáreas afectadas; periodo 2014, 74 incendios con 1293 hectáreas afectadas; periodo 2015, 58 incendios con 1579 hectáreas afectadas y periodo 2016, 50 incendios 4151 hectáreas afectadas.
Comparando los periodos 2013 al 2016, se observa un incremento del 400% en el último año. Los incendios, además de las especies forestales nativas y exóticas, afectaron arbustos, cultivos y pajonales (7).
De acuerdo a los datos registrados por la Unidad de Gestión de Riesgos de Cochabamba, el número de hectáreas afectadas por incendios en la provincia de Quillacollo en el año 2016 aumentó un 600% en comparación al año 2015, afectando principalmente a arbustos, pajonales y especies nativas.
Los datos registrados sobre la cantidad de incendios muestran que las provincias de Quillacollo, Cercado y Sacaba han incrementado el conteo de incendios con respecto al año 2015, mientras que las provincias de Tiquipaya, Vinto y Sipe Sipe han logrado disminuir de manera considerable el número de incidencias.
2. Metodología
Para llevar a cabo este análisis es necesario contar con un equipo de captura permanente de imágenes a intervalos regulares, para ello, se utilizó un Raspberry Pi 2 y una cámara Pi de 5 mega pixeles, conectando estos componentes a Internet mediante un cable de red, y utilizando un script Python para la captura y envío a intervalos regulares de las imágenes obtenidas; se envió la información a un servidor para su procesamiento en tiempo real. Es importante mencionar que la placa de Raspberry Pi y la cámara deben estar debidamente protegidas contra condiciones atmosféricas (lluvias, viento, granizo, tormentas eléctricas, exposición directa al sol durante tiempos prolongados) en caso de que sean instaladas al aire libre.
El intervalo de captura de imágenes que se utilizó en este estudio es de dos minutos, las cámaras fueron instaladas en el 5to piso (bloque A) del edificio de la Universidad Católica Boliviana Regional San Pablo en el campus de Tupuraya: una cámara fue apuntada al norte, cubriendo una parte del área protegida del Parque Tunari y las secciones de cordillera aledañas hacia el oeste (detección de focos de incendios), mientras que la otra cámara fue apuntada hacia el sur, cubriendo las inmediaciones de la laguna Alalay y el cerro de la Coronilla (detección de smog); tanto el tiempo de captura como las condiciones de luz de la cámara son programables utilizando el script Python.
En el lado del servidor las imágenes se analizaron con el software MATLAB (se utilizaron las herramientas de la caja de visión por computador); para realizar el análisis de imagen se utilizó una combinación de técnicas que incluyen la substracción de imágenes, división por planos de color, análisis por escala de gris, segmentación, detección morfológica, umbral y dilatación.
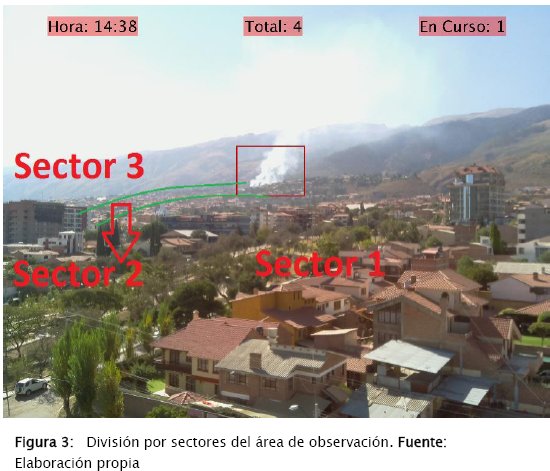
Para determinar la eficiencia del sistema de detección de focos contaminantes se realizó una división en sectores por distancia, donde, el sector 1, toma en cuenta hasta una distancia de 1.5 km.; el sector 2, toma en cuenta hasta una distancia de 3 km., y el sector 3, hasta 4 km.
El sistema de detección de smog debe ser calibrado antes de su uso, detectando cuál es el nivel de gris predominante en la imagen para utilizarlo como dato necesario en los algoritmos de búsqueda y detección de pixeles que representan contaminación atmosférica; esto se debe a que no todas las ciudades ni todas las zonas presentan los mismos niveles de contaminación. En el caso de Cercado los niveles de gris promedian alrededor de 170 para los pixeles contaminados, es decir que los componentes RGB del pixel adquieren un valor de 170 (+- 25) en una escala de 0 a 255 (8 bits de codificación de color para cada elemento de pixel); también es importante definir el rango de oscilación del valor promedio mediante observación.
3. Resultados
3.1 Detección de focos de incendio
Para poder realizar un estudio de eficiencia se clasificaron los incendios en tres categorías, de acuerdo a la proporción de ancho y alto que estos ocupan en la imagen, la clasificación es aproximada a los siguientes valores:
La eficiencia general se calcula con un análisis fotograma a fotograma, donde se cuentan las incidencias de focos contaminantes y se comparan con las mediciones (detecciones) del software: si a lo largo de un día un observador humano detecta 7 focos contaminantes y el software realiza 6 detecciones correctas (se considera correcta si el observador humano identificó el mismo foco contaminante), y 3 detecciones incorrectas (se considera incorrecta si el observador humano no identificó ningún foco contaminante), entonces el total de detecciones (correctas más incorrectas) es de 10 (7 correctas del observador humano más 3 incorrectas del software), de las cuales 6 fueron detectadas de manera correcta, lo que lleva a una eficiencia del 60% (6 correctas por cada 10 detecciones).
Esto implica que para calcular el porcentaje de eficiencia es necesario dividir las detecciones correctas del software entre la suma de las detecciones correctas del observador humano con las detecciones incorrectas del software.
Para el sector 1 (hasta una distancia de 1.5 km) el sistema tiene una eficiencia entre 60% y 85% en todos los días medidos; el restante porcentaje se divide entre los errores de luz y los focos contaminantes no detectados. Es importante mencionar que de los focos contaminantes no detectados el 100% era perteneciente al grupo de focos pequeños. En la Figura 3 se puede distinguir este sector por debajo de la línea de color verde inferior.
En el sector 2 (hasta una distancia de 3 km) el porcentaje de detección oscila entre el 50% y 70% en todos los días medidos; el restante porcentaje consiste de errores de luz y un gran porcentaje de focos no detectados, de los cuales el 100% corresponden a focos pequeños. En la Figura 3 se puede distinguir este sector ubicado entre las dos líneas de color verde.
En el sector 3 (hasta una distancia de 4 km) el porcentaje de detección oscila entre el 40% y 60% en todos los días medidos; el restante porcentaje se divide entre errores de sector y focos no detectados, de estos últimos un 70% corresponde a focos pequeños y un 30% a focos medianos. En la Figura 3 se puede distinguir este sector en el área que se encuentra por encima de la línea de color verde superior.
Observando varios días de medición se dedujo que el sistema funciona mejor en los días que presentan pocas nubes (días soleados): en los días que hubo un gran flujo de nubes existieron muchos errores relacionados con el cambio de iluminación en las regiones de sombra.
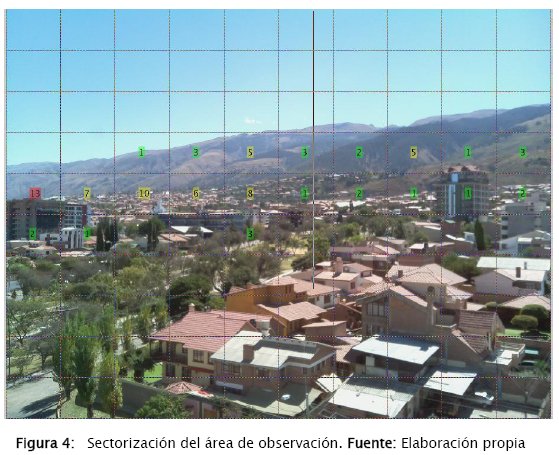
Para poder realizar un estudio más detallado de las zonas de emisión de contaminantes se dividió la imagen de análisis en una grilla de 10 x 10, resultando un total de 100 sectores; para visualizar de mejor manera los resultados estos se graficaron en la grilla, indicando cuantos focos contaminantes se produjeron en cada sector (Figura 4).
Con la visualización gráfica de estos resultados es posible determinar cuáles son los lugares que generan más contaminación en un periodo determinado: en el caso específico de este periodo se determinó que en el sector central de la imagen hay una fuente constante de emisión de contaminantes, con especial actividad entre las 10:00 de la mañana y las 12:00 del mediodía en días laborales.
Con evidencias visuales es posible utilizar esta información para presentar las denuncias correspondientes ante las autoridades competentes, teniendo un registro exacto de la hora, el día, la ubicación y el periodo de emisión.
Los resultados mostrados en la Figura 4 corresponden a la sumatoria (por sectores) de la detección de focos contaminantes a lo largo de un periodo de medición de una semana, en el área delimitada en la imagen.
3.2 Detección de zonas contaminadas
El reconocimiento de smog por escala de grises muestra de manera clara la cantidad y ubicación de la nube de smog que cubre la ciudad; la idea detrás de esta técnica es que la contaminación atmosférica es de color gris, por lo tanto, detectando los pixeles de este color (en un rango predeterminado), es posible detectar los sectores de la imagen que presentan mayor contaminación.
En la Figura 5 se puede observar la altura (entre 300 y 400 m, por análisis de perspectiva) que alcanza la contaminación para una imagen tomada el día 03/06/15 a las 10 am; el nivel de gris predominante en la atmosfera en esta imagen es el 170 (escala de 0 a 255), lo que implica que está aproximadamente a medio camino entre el color gris y el negro.

A pesar de que en este caso no fue posible obtener los datos de sensores químicos de polución del aire, es posible realizar una asociación de estos niveles con los niveles de gris detectados en la imagen (comparando el mismo lugar al mismo tiempo para la calibración), generando una tabla de correlación de valores para aproximar el valor de la polución real mediante la cantidad y tono de pixeles de color gris detectados en la imagen.
4. Discusión
4.1 Detección de focos de incendio
La posibilidad de detectar incendios forestales en el Parque Tunari y de otro tipo y generar una alarma al servicio de bomberos en tiempo real implica un gran avance en comparación a los métodos actuales, disminuyendo drásticamente los tiempos de respuesta y previniendo la expansión innecesaria del fuego, lo que en última instancia significa preservar la flora y fauna de la región, reducir el riesgo de desastres de incendios y mejorar la seguridad de las poblaciones asentadas en el parque.
El día 7 de agosto de 2017 ocurrió un gran incendio en el parque Tunari, que consumió al menos 20 hectáreas, debiendo desplazar a los pobladores de la zona por las grandes cantidades de humo provenientes del incendio (5).
Al realizar el análisis de imagen en la detección de focos de incendios hay que tomar en cuenta y controlar los siguientes errores:
Errores de luz: Estos errores ocurren por la mala interpretación de un cambio brusco de iluminación entre dos imágenes consecutivas, son típicos del amanecer, del atardecer y de los días con un elevado flujo de nubes. Para contrarrestar estos efectos es posible aplicar filtros de área, de hora, o una combinación de ambos.
Errores de conteo y sector: Un error de conteo ocurre cuando existen múltiples detecciones consecutivas en un mismo sector o en sectores aledaños; esto sucede cuando el foco contaminante tiene una duración prolongada y la existencia de viento desplaza la nube de humo a sectores adyacentes. Este error es uno de los más importantes ya que afecta severamente a la precisión del sistema, realizando una sobre-detección y generando un exceso en el conteo, cuando en realidad debería corresponder a un solo foco contaminante. Para corregir este error es posible implementar una matriz de adyacencia de sectores, ignorando detecciones que ocurran dentro de dicha matriz en un periodo de tiempo determinado después de la primera detección en el punto central de la matriz, desde el cual se definen los sectores aledaños.
Errores de no detección: Ocurren cuando el foco contaminante es lo suficientemente pequeño como para no sobrevivir al proceso de filtrado de imagen, ocurren en mayor medida en los sectores más lejanos del punto de observación debido a la perspectiva de la cámara. Estos errores son los más difíciles de corregir, para ello es necesario calibrar con mucha precisión los valores de umbral y las estructuras morfológicas utilizadas (así como sus tamaños en pixeles) en el proceso de filtrado, cuidando de no perder la precisión al no filtrar de manera adecuada el ruido en la imagen.
4.2 Detección de zonas contaminadas
Una de las principales utilidades de la detección de niveles de gris en la imagen (a parte de la relación con datos de estaciones químicas) es la concientización de la población: al mostrar estas imágenes en una página web de acceso público la gente puede ver cuál es el estado de la contaminación en el lugar en donde viven, creando conciencia social sobre la necesidad de disminuir los niveles de contaminación que se generan en la ciudad.
Las zonas que presentaron más emisión de contaminantes, es decir las cuadrículas con los valores 13 (x:0,y:4) y 10 (x:2,y:4) de la Figura 4 (origen en la esquina superior izquierda x:0,y:0), deben su estado a dos fuentes de emisión de contaminantes regulares ubicadas en esas zonas: en el caso de la cuadrícula 10 se debió a una constante quema (casi periódica) de materiales, lo que generó nubes de humo blanco de tamaño considerable, durante la mayor parte del año 2016 fue posible observar estas emisiones en dicho sector debido a la continuidad de sus operaciones.
La cuadrícula x: 7, y: 3 es especialmente interesante dado que existe un bajo registro que no llega a cuantificar de manera correcta la actividad que ocurre: en este sector existe un barranco entre la loma de "Las Lomas" y el Parque Tunari. En este barranco ocurren quemas comunes, pero el foco de contaminación se encuentra muy por debajo del espacio aéreo visible en la imagen, por lo tanto cuando el humo sube lo suficiente como para ser visible a la cámara, este tuvo el tiempo suficiente para dispersarse, por lo cual el software no fue capaz de distinguir esta sección de la imagen como una columna de humo sólida, evadiendo la detección del foco contaminante.
Esta observación se realizó por testigos oculares dada la imposibilidad de poner una cámara en un sector que registre de manera precisa esta situación.
4.3 Análisis de costos
Se procedió al análisis de costo tomando en cuenta que el material que se utilizó es el siguiente:
El precio de la carcasa protectora del dispositivo es aproximado, dado que su implementación es posible utilizando materiales reciclados o disponibles, con la única condición de que sea apto para soportar las condiciones climatológicas a las que esté expuesto (en caso de que sea instalado en el exterior); en caso de ser instalado en el interior (un lugar protegido) no es necesaria la utilización de una carcasa protectora.
5. Conclusiones
1. Contar con un sistema de detección de focos de incendio en tiempo real es una mejora substancial a la situación actual, en la cual no se cuenta con ningún sistema para este fin: las alarmas inmediatas pueden salvar vidas si se acompañan de un equipo de respuestas de emergencia.
2. El área de detección de focos de incendio abarca un área de hasta 4 km. aproximadamente, disminuyendo el porcentaje de eficiencia mientras más lejos ocurre el incendio en comparación al punto de captura de imagen: este problema puede solucionarse con la implementación de varias cámaras, cada una a una distancia apropiada del objetivo que se quiere monitorear.
3. El sistema de detección de incendios basado en nubes de humo no funciona en la noche, dado que la visibilidad es demasiado baja como para detectar cambios en la imagen, sin embargo si la porción de color rojo visible del incendio es lo suficientemente grande, se detectará como un cambio mayor en la imagen.
4. El bajo costo de este sistema permite una implementación masiva a un bajo precio, permitiendo cubrir áreas de decenas de kilómetros de cordillera con pocas cámaras, aspecto que podría ser asumido por las entidades competentes de la gobernación de Cochabamba.
5. La técnica de análisis de imagen por escala de grises puede ser utilizada para la detección de contaminación en áreas urbanas permitiendo estimas la altura de la capa de mezcla.
6. Por medio de estudios posteriores se podrá realizar una correlación entre los niveles de polución medidos por estaciones de medición ambiental química y los niveles de gris detectados en las imágenes. Gracias a esta correlación se podrán obtener valores aproximados de los niveles reales de polución únicamente a través de la fotografía digital.
Referencias Bibliográficas
[1] Redacción Central. Cochabamba tiene un vehículo por cada 8 habitantes. [En línea] Septiembre de 2012. http://www.lostiempos.com/actualidad/local/20120409/cochabamba-tiene-vehiculo-cada-8-habitantes
[2] Red MoniCA. Informe Nacional de Calidad del Aire de Bolivia. [En línea] Marzo de 2016. http://www.mmaya.gob.bo/uploads/libros/calidad%20del%20aire%20Nacional%20baja%20res.pdf
[3] SwissContact. Calidad del aire. Cochabamba : Proyecto Aire Limpio, 2015. [ Links ]
[4] Organización Mundial de la Salud. Los efectos sobre la salud. [En línea] OMS, Marzo de 2014. http://www.who.int/phe/health_topics/outdoorair/databases/health_impacts/es/.
[5] Los Tiempos Digital. Incendio en el parque Tunari se expande y unidades tienen dificultad para controlar el fuego. [En linea] Agosto de 2017. http://www.lostiempos.com/actualidad/local/20170808/incendio-parque-tunari-se-expande-unidades-tienen-dificultad-controlar. [ Links ]
[6] Bolivia en tus manos. Información general de ciudad de Cochabamba. [En línea] Junio de 2017. https://www.boliviaentusmanos.com/turismo/informacion/ciudad-de-cochabamba.html [ Links ]
[7] Unidad de Cambio Climático Riesgos y Desastres de la gobernación de Cochabamba (UCCRyD)

