










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkActa Nova
On-line version ISSN 1683-0789
RevActaNova. vol.1 no.2 Cochabamba 2001
Dos Enfoques para Mejorar la Navegación Pedestre por GPS
Quentin Ladetto, Vincent Gabaglio, Bertrand Merminod
Geodetic Engineering Laboratory, Institute of Geomatics
Swiss Federal Insitute of Technology, Lausana, Suiza
e-mail: quentin.ladetto@epfl.ch
Resumen
El presente artículo presenta la calibración de los diferentes modelos utilizados para la navegación pedestre. La información sobre distancias recorridas y el azimut detectado por sensores inerciales es combinada con observaciones de GPS utilizando filtrado de Kalman. Todos los modelos utilizan posiciones de GPS sin correcciones diferenciales para calibrar los errores sistemáticos presentes en sensores inerciales.
Han sido desarrollados diferentes prototipos que integran compases magnéticos digitales o giroscopios, acelerómetros tri- o bi-axiales, un altímetro y un receptor GPS de monofrecuencia.
Los resultados demuestran que un sistema integrado, comparado al uso de un receptor GPS solo, mejora la fiabilidad y precisión de la trayectoria. Una precisión absoluta de menos de 5 metros se logra y se mantiene incluso bajo el modo Dead Reckoning (DR) (cálculo estimado), por ejemplo cuando ninguna señal de satélite está disponible. Aprovechando la fuerte correlación entre épocas, no es necesario el uso de correcciones de DGPS para calibrar los modelos de DR.
Lo numerosos desafíos de este campo de investigación se desarrollan en este momento en el Instituto de Geomática (IGEO-TOPO) del Swiss Federal Institute of Technology (EPFL) en estrecha colaboración con el Swiss Center for Electronics and Microtechnology (CSEM) como también con Leica Geosystems AG.
Palabras Clave: Navegación pedestre, GPS.
Introducción
De acuerdo con las necesidades y la especificidad de la navegación pedestre, el enfoque clásico GPS/INS usado para la navegación en vehículos no es adecuado. Surgen limitaciones debido a restricciones en el peso, tamaño y ergonomía del instrumento. El sistema debe ser capaz de determinar la posición de una persona en presencia y en ausencia de medidas GPS. El principal desafío es mantener una buena precisión incluso cuando no se dispone de datos satelitales.

Figura 1: Leica Digital Magnetic Compass (DMC-SX).
La creciente demanda en el posicionamiento de personas para aplicaciones médicas, SIG, acciones de rescate o militares, requieren de tecnologías adaptadas. El desarrollo de Unidades de Medidas Inerciales (IMUs en inglés), miniaturizadas y de bajo consumo, combinadas con sistemas satelitales pueden brindar un posicionamiento preciso al interior y al exterior de habitaciones. Las IMUs están diseñadas generalmente para brindar información sobre aceleración en 3D y rotaciones. Un IMU basado en giroscopios y otro que utiliza magnetómetros para calcular el azimut serán considerados en el presente artículo.
Como las señales de satélite no siempre están disponibles, el desarrollo de métodos de cálculo estimado (modo DR) son necesarios para proporcionar un posicionamiento continuo. La naturaleza del caminar humano varía grandemente y es muy difícil de predecir. Esta característica sugiere la implementación de modelos de navegación que difieren bastante de los modelos "clásicos" aplicados en vehículos. Se tienen que tomar aspectos fisiológicos que requieren de una calibración en línea. En un esfuerzo por superar las limitaciones de los modelos que funcionan sólo en condiciones de marcha "estándar", se han realizado investigaciones para detectar automáticamente desplazamientos hacia adelante, hacia atrás y pasos al costado.
Las aplicaciones en navegación pedestre requieren, en su mayoría, información en tiempo real. Gracias a la mejora en la precisión del sistema GPS desde la supresión de la disponibilidad selectiva, la posición absoluta calculada también llamada "solución absoluta", se considera suficientemente precisa para las aplicaciones propuestas. Derivando y filtrando las posiciones, época por época para determinar la velocidad y el azimut también permite una buena calibración de los parámetros del modo DR.
Este artículo presenta una breve introducción a los principios de la navegación pedestre y los problemas que presenta, luego se propone dos prototipos de GPS-INS de bajo costo que han sido desarrollados en nuestro laboratorio con sus especificaciones y sus aplicaciones. Finalmente se analizan varios ensayos realizados bajo diferentes condiciones.

Figura 2: Estructura del algoritmo para navegación pedestre.
2 Principios de navegación pedestre
La mecanización inercial clásica para determinar la velocidad, posición y orientación, no es adecuada para la navegación pedestre [8, 10, 5, 9]. Un procedimiento en el que se detecta el número de pasos y se multiplica por una distancia promedio del paso, produce resultados mucho mejores que la integración matemática de la señal de un acelerómetro. La relación entre la dimensión de un paso y la velocidad de marcha está bien explicada en la literatura [2, 12, 14]. El aumento y modificación de algunas fórmulas en función de datos disponibles, permite obtener un modelo preciso para calcular la distancia recorrida independientemente de la persona que lo realiza. Por lo tanto la distancia recorrida es estimada principalmente mediante acelerómetros.
Habiendo calculado la distancia recorrida, la línea de visión debe ser determinada continuamente para determinar la posición en modo DR. Esto se logra utilizando sensores magnéticos o giroscopios.
Los datos de satélite se utilizan principalmente para corregir la desviación del azimut de los sensores magnéticos así como la desviación y la deriva de los giroscopios. La integración de los datos se realiza utilizando diferentes algoritmos de filtrado de Kalman que serán discutidos más adelante.
3 Dos enfoques complementarios GPS-INS de bajo costo
Aprovechando la producción industrial de sensores miniaturizados, se siguen dos líneas de investigación: primera, se determina la dirección Norte por medio de un sensor de campo magnético; segunda, se deduce esta orientación con la ayuda de giroscopios. Ambos sistemas tienen sus fortalezas y debilidades y pueden complementarse entre sí.

Figura 3: Señal del azimut bruta y filtrada. La variación de la señal es provocada esencialmente por el balanceo fisiológico de las caderas durante la marcha.
Estos aspectos serán discutidos al final del artículo.
3.1 GPS y DMC
El alma del primer prototipo es el Leica Digital Magnetic Compass (DMC-SX) (ver Figura 1) que combina tres micro-acelerómetros electromecánicos (MEMs) y tres magnetómetros. Para ser rigurosos, el azimut se define como el ángulo entre la proyección horizontal de línea de visión de la persona que camina y la componente horizontal del campo magnético de la tierra. Conociendo la dirección hacia la cual apunta la persona, el azimut se calcula por la proyección del campo magnético de la tierra medido por los tres sensores magnéticos ortogonales y dos sensores de inclinación. Actualmente las especificaciones del Leica DMC-SX concernientes a la precisión, tamaño, y consumo energético lo hacen el mejor candidato para tales aplicaciones. De acuerdo al conocimiento del autor, la comunidad de vigilancia utiliza este sensor en varios proyectos de búsqueda de petróleo y en sistemas móviles de mapeo (MMS) [3].
Para comparar el azimut producido por el DMC-SX con el derivado a partir de dos posiciones sucesivas de GPS, la primera tiene que ser corregida por la declinación magnética. La declinación magnética es el ángulo de diferencia entre el norte geográfico y el norte magnético. Este último varía en función del tiempo y posición geográfica. Modelos regionales y globales se encuentran disponibles y se conocen como International Geomagnetic Reference Field (IGRF) . Algunos países poseen su propia representación matemática del campo magnético con mayor precisión. Para la navegación pedestre, una precisión de 1° es suficiente, por lo que modelos globales son generalmente adecuados.
Para el cálculo de posición absoluta y la calibración de diferentes algoritmos de DR, el sistema utiliza la salida de un GPS monofrecuencia producido por /z-blox AG. Hasta el presente, la presión del aire y la temperatura eran grabadas en estaciones meteorológicas sincronizadas separadamente. Todos los datos eran integrados posteriormente. La inclusión de un transductor de presión de aire miniaturizado está siendo realizada actualmente en una segunda generación de prototipos.
3.1.1 Revisión de la metodología
Las diferentes señales autónomas que se analizarán están fuertemente influenciadas por la ubicación de la unidad sobre el cuerpo. Para mantener la estabilidad durante la marcha, la unidad es ubicada a nivel de la cintura de la persona. La señal del azimut corresponderá entonces con la línea de visión de la cintura que, la mayor parte del tiempo, es también la dirección de marcha. La precisión del azimut depende fuertemente de perturbaciones locales del campo magnético. Estas perturbaciones pueden ser caracterizadas en magnéticas duras y magnéticas blandas. Las perturbaciones magnéticas duras están caracterizadas por imanes permanentes y corrientes eléctricas que provocan cambios en el campo magnético terrestre respecto a su orientación e intensidad. Las perturbaciones magnéticas blandas son causadas por materiales magnéticos que distorsionan el campo magnético terrestre y por lo tanto sus efectos dependen de la intensidad y orientación del campo. Una explicación más exhaustiva de estos fenómenos puede encontrarse en [6] y [1].
Diferentes rutinas de calibración han sido implementadas en el DMC-SX que son examinadas antes de colocarlas en el instrumento y la persona. Sin embargo, día a día, el campo magnético es perturbado por una gran variedad de fuentes tales como computadoras, líneas de alta tensión, objetos de acero, refuerzos en edificios, etc. El error provocado en el azimut por estas perturbaciones es proporcional a la inversa del cuadrado l/d2 (posiblemente del cubo, 1/d3) de la distancia al objeto. Algunos de estos efectos se eliminan gracias al filtrado de la señal del azimut, pero en ausencia de una señal externa como las de GPS o giroscopios, las perturbaciones no pueden ser compensadas. Se tienen que tener un particular cuidado de no filtrar el movimiento cuando se alisa la señal del azimut.
Como las perturbaciones tienen una tendencia a ser relativamente constantes en un entorno dado, pueden crearse mapas de corrección de campos magnéticos para áreas tales como campus, centros comerciales, o cualquier otro área de particular interés. Una aplicación típica podría ser buscar la salida desde el interior de un edificio; una situación bastante común para un ciego o un bombero en condiciones de visibilidad reducida (presencia de humo) al interior de un edificio.
Si el principal interés es la repetibilidad de una trayectoria, no se requiere de una compensación en particular.
Después de varios ensayos, se escogió ubicar el sensor en la parte baja de la espalda, que puede ser considerada como relativamente estable durante la marcha. Esta estabidad

Figura 4: Datos brutos y filtrados del giroscopio durante un giro a 10°/s.
va a influenciar principalmente la señal del azimut como también la fiabilidad del sistema de detección de los pasos. Sin embargo la dirección de la cintura no siempre corresponde con la dirección de marcha, como en el caso de pasos hacia atrás o hacia un lado. Esos movimientos son detectados a través del filtrado de las señales y el reconocimiento de patrones en el acelerómetro tri-dimensional del IMU. Una vez que se conoce la dirección de desplazamiento, se calcula la dirección del azimut.
La combinación con datos de GPS se realiza utilizando diferentes filtros de Kalman. Cuando se dispone de datos GPS, se utilizan modelos individuales para la calibración de la dimensión de los pasos y la señal de los magnetómetros. Se tiene particular cuidado con la determinación del azimut a partir de las posiciones de GPS. Debido a que el error en la posición afecta la precisión del azimut, la precisión de la orientación calculada estará fuertemente correlacionada con las distancias entre las épocas consideradas. Este aspecto tendrá una gran influencia sobre la calibración de la desviación del azimut. Un diagrama de bloques del enfoque de la integración se presenta en la Figura 2.
3.2 GPS y giroscopio
El segundo enfoque consiste en utilizar un giroscopio para determinar la línea de visión de la marcha. Los ensayos y las investigaciones han sido hechas utilizando el Crossbow DMU. Esta Unidad de Movimiento (MU) mide la aceleración en tres ejes ortogonales así como la velocidad de rotación sobre cada eje. Esto se logra con tres acelerómetros MEMS (silicio con superficie micro-labrada) y tres giroscopios. Los giroscopios consisten de una placa de cerámica vibradora que utiliza la fuerza de coriolis para determinar

Figura 5: Actualización del azimut: los datos GPS brutos (línea punteada) y filtrados (línea llena), actualizan el azimut del INS (línea cortada). Se cambia el azimut como también la pendiente del azimut del INS, es decir la desviación del giroscopio.
la velocidad angular [11] . El DMU emplea un procesador inercial y un sensor de temperatura para compensar los errores determinísticos. Este instrumento fue escogido al inicio de los estudios por su costo relativamente bajo y la posibilidad de integrar los seis sensores; no es conveniente para el desarrollo de equipos pero ofrece buenas cualidades para la investigación. Investigaciones previas en el laboratorio mostraron que dos acelerómetros y un giroscopio son suficientes para calcular la trayectoria en dos dimensiones de una persona caminando [4] . Toda la metodología presentada a continuación se construye en base al uso de estos sensores inerciales.
Los sensores inerciales producen una señal en respuesta a una señal física (aceleración o rotación) gracias al uso de un sensor de desviación y uno de escala:
Señal = desviación + factor de escala x señal física (1)
La desviación es la señal producida por el sensor cuando no hay una señal de entrada. El factor de escala es la relación entre el cambio en la señal de salida y el cambio en la señal de entrada [11].
Estos dos parámetros cambian con el tiempo (en especial la desviación) y deben ser calibrados antes y/o durante el uso. La influencia de la desviación en el acelerómetro es despreciable debido a la manera en que se calcula la distancia. Este no es el caso de los giroscopios. La desviación induce una deriva del azimut y por lo tanto de la posición. Como los giroscopios indican sólo la velocidad angular, se debe encontrar una orientación inicial. La integración simple produce la orientación absoluta que se utiliza en el cálculo en modo DR.

Figura 6: Test en la pista de atletismo. Arriba: las trayectorias de GPS (línea cortada) y la trayectoria de GPS-giroscopio. Abajo: La desviación estándar del azimut y la posición (este: línea punteada, norte: línea llena).
Para la posición absoluta, el sistema utiliza un receptor GPS de monofrecuencia fabricado por BAE systems (antes Canadian Marconi): el Alistar. Calcula la posición a 2 Hz. La posición absoluta se calcula con el código GPS alisado por la fase portante [7]. Derivando dos posiciones sucesivas de GPS se producen valores precisos de azimut y velocidad. Se debe tener especial cuidado en la detección del desfase del ciclo durante el conteo del ciclo portante. Este azimut se utiliza para inicializar la orientación y la calibración de la desviación.
3.2.1 Revisión de la metodología
Los sensores se ubican sobre el tórax. Esta ubicación permite utilizar el mismo sensor que el utilizado para la detección de caídas, desarrollado por el CSEM para aplicaciones en emergencias. Un acelerómetro es ubicado verticalmente (pseudo-vertical), un segundo es montado de forma perpendicular al primero y orientado hacia la dirección de
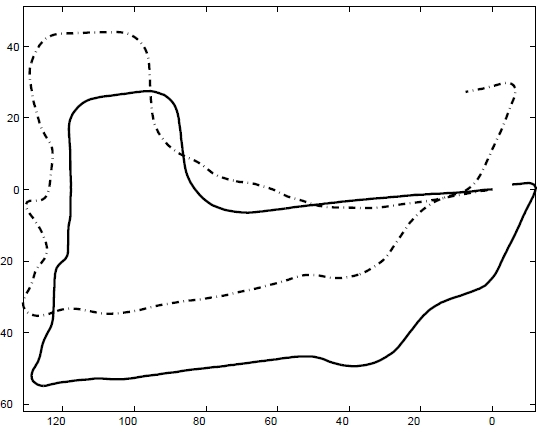
Figura 7: Trayectorias a partir de un giroscopio (línea llena) y de un DMC (línea punteada) en ambiente con perturbaciones magnéticas.
marcha (antero-posterior). El giroscopio mide la velocidad de rotación sobre el eje del primer acelerómetro. La información de orientación es por lo tanto "pseudo horizontal". El error de horizontalidad puede ser tomado en cuenta por un factor de escala.
Durante una marcha erguida, el giroscopio produce una señal donde la periodicidad del paso se detecta claramente. Errores aleatorios degradan más la señal (ver Figura 4).
Los datos filtrados del giroscopio todavía contienen errores que influencian la orientación. El factor de escala y el desvío tienen que ser determinados y la integración de la velocidad angular requiere de una orientación inicial. En lo que concierne al factor de escala, la calibración se realiza en el laboratorio para cada sensor. Este parámetro permanece relativamente estable en comparación con la desviación. Además el cambio en el factor de escala durante la marcha no es fácilmente observable mientras no se logre una buena determinación de la desviación. Por lo tanto, no es apropiada una calibración en línea del factor de escala.
La determinación de la desviación se logra utilizando el azimut determinado a partir del GPS. El azimut inercial dado por el giroscopio se compara con el azimut dado por el GPS utilizando un filtro de Kalman. Este filtro distribuye la diferencia en el azimut entre el cambio de orientación y el cambio en el desvío. La diferencia también se propaga a la posición estimada. Es decir que cuando se dispone de un GPS y se actualiza el azimut, los siguientes parámetros son modificados: la desviación de los giroscopios, la orientación (como se muestra en la Figura 4) también la posición (Figura 5).
La posición del GPS está implementada en el mismo filtro. Con cambios mínimos,

Figura 8: Comparación de integraciones de GPS-DMC y GPS-giroscopio sobre un recorrido en un área residencial.
cualquier posición producida por otro sistema (GSM, Loran, ...) puede ser implemen-tada en el filtro. Por eso, el algoritmo desarrollado puede ser ampliado fácilmente para incluir otros sistemas de posicionamiento. La estructura de los algoritmos se presenta en la Figura 2.
4 Resultados
Para evaluar el sistema GPS-acelerómetro-giroscopio, se realizaron ensayos en una pista de atletismo. La distancia recorrida estimada a partir de acelerómetros tiene un error de 4 m sobre 400 m de recorrido real. Otros ensayos muestran que la distancia recorrida puede ser estimada con una precisión del 2%. La Figura 6 muestra la integración de las posiciones, su precisión y la desviación estándar del azimut.
Al inicio del recorrido, no se conoce ni la orientación inicial ni la desviación. Por lo tanto el sistema necesita algunas actualizaciones del azimut y la posición. Todas las actualizaciones se realizan cada vez que la precisión del azimut alcanza 5o.
La estimación de la desviación en las primeras actualizaciones puede conducir a un gran error (Figura 6). Después de 400 m, la desviación es determinada con una precisión menor a 0.1°/s. El error en la posición al final del recorrido es de 4m. La

Figura 9: Ensayo en modo DR puro de una persona que camina en ambos lados de una calle.
desviación estándar del azimut y de la posición aumentan entre cada actualización (debido a la propagación de errores en el modo DR), pero globalmente disminuyen en cada actualización. Por ejemplo, en cuanto a la posición, la precisión es de 15 m en la primera actualización (precisión del GPS) y de 5 m en la última actualización. Eso muestra que la integración del GPS con otros sensores, permite no solamente llenar las lagunas del GPS sino también mejorar la precisión y confiabilidad.
Si sólo se actualiza el azimut, utilizando información sobre el azimut que proviene de otros sensores (como el DMC), las precisiones de ambos, el azimut y la posición, son mejoradas. Pero la precisión en la posición no puede ser menor que la alcanzada en la última actualización de la posición.
Para analizar la influencia de perturbaciones magnéticas duras y blandas sobre la trayectoria, se realizaron ensayos en zonas con una elevada presencia de hierro y líneas de corriente eléctrica (Figura 7). Las perturbaciones locales de la brújula aparecen claramente, influenciando grandemente la trayectoria. La solución del giroscopio, como era de esperarse, no es influenciada por el ambiente. Hay que subrayar que una vez que se pasa la zona de distorsión del campo magnético, el azimut calculado vuelve a los valores que tenía antes de la perturbación.
Otro ensayo se realizó en un área donde era posible experimentar la pérdida de algunas señales de satélite y la presencia de perturbaciones "normales" del campo magnético terrestre (Figura 8). La distancia total de la trayectoria, medida por la fase portante diferencial de GPS, es 1840 m. El cambio de altitud durante el recorrido es de 31 m y la pendiente máxima es 13%.
El error máximo entre la trayectoria calculada y la trayectoria real es de 5.2 m para el sistema GPS-DMC y de 25 m para el módulo GPS-giroscopio.
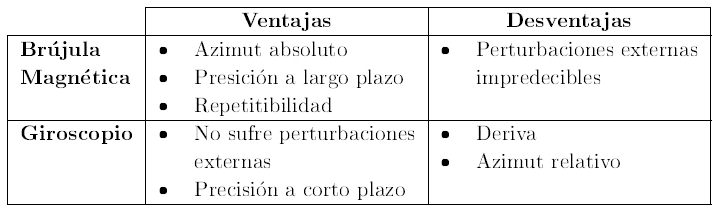
Tabla 1: Comparación entre la brújula magnética y el giroscopio.
Un ensayo en modo DR puro fue realizado a lo largo de un recorrido tortuoso utilizando el sistema GPS-DMC. El objetivo era ver si los modelos utilizados son lo suficientemente precisos como para distinguir en cual lado de la calle está caminando una persona. Una persona caminó en ambos lados de una calle en un recorrido cerrado sobre una distancia de 3019 m. La distancia recorrida según los cálculos difiere de la real en un 1.3% (2979 m) y la diferencia en la posición al final del recorrido es de 5.6 m (0.2%). La trayectoria diagramada en la Figura 9 muestra que la expectativa ha sido satisfecha.
5 Conclusiones
Los diferentes ensayos realizados en paralelo con los dos sistemas de sensores muestran claramente sus debilidades y ventajas. De acuerdo a esos resultados, un sistema optimizado y más confiable se obtendría integrando los giroscopios y las brújulas magnéticas. Una vez más, la información que se obtiene con la acción combinada de ambos sistemas será superior al de la obtenida por cada sistema por separado.
El giroscopio proporcionará una indicación útil para identificar perturbaciones magnéticas, mientras que la brújula será útil para determinar la desviación de los giroscopios y la orientación inicial, incluso cuando no se dispone de información del GPS.
6 Agradecimientos
Parte de estos estudios fueron realizados en el laboratorio KINGNAV dirigido por el Prof. Klaus Peter Schwarz, Department of Geomatics, University of Calgary, Canadá, gracias a una beca del Swiss National Science Foundation, obtenida por el primer autor.
El segundo autor es apoyado por el CSEM, Centre Suisse d'Electronique et de Mi-crotechnique SA, Neuchátel, Suiza.
Un agradecimiento especial a Mr. Josephus van Seeters y al Dr. Silvio Gnepf de Leica Geosystems por la numerosas y productivas discusiones.
Referencias
[1] M.J. Carusso. Application of magnetic sensors for low cost compass systems. En Proceedings of IEEE Positioning, Location and Navigation Symposium (PLANS), pp 177-184, San Diego, Marzo 13-16, 2000. [ Links ]
[2]G.A. Cavagna. Physiol, (61):3-42, Paris 1969. [ Links ]
[3]C. Ellum y N. El-Shimy. A mobile mapping system for the survey community. En Mobile Mapping MMS2001, El Cairo, Enero 3-5, 2001. [ Links ]
[4]V. Gabaglio y B. Merminod. Using satellite positioning system and inertial sensor for human navigation. En GNSS, Edingurh (se), Mayo 1-4, 2000. [ Links ]
[5]V. Gablagio y B. Merminod. Real time calibration of length of steps with GPS and accelerometers. En GNSS, Genova Italia, 1999. [ Links ]
[6]S. Gnepf. Leica Digital Manetic Compass, System International Handbook. Leica Product Literature. [ Links ]
[7]R.R. Hatch. The synergism of gps code and carrier measurement. En Proceedings of the Fourth International Geodetic Symposium on Satellite Positioning, pp 1287-1928, Las Cruces, Abril 28 - Mayo 2, 1982. [ Links ]
[8]T. Judd. A personal dead reckoning module. En ION GPS-97, Kansas City, Missouri, Septiembre 16-19, 1997. [ Links ]
[9]Q. Ladetto. On foot navigation: Continuous step calibration using both comple-mentary recursive prediction and adaptive kalman filtering. En ION GPS, Salt Lake City, Utah, Septiembre 19-22, 2000. [ Links ]
[10]Q. Ladetto, V. Gabaglio, B. Merminod, P. Terrier, y Y. Schutz. Human walking analysis assisted by DGPS. En GNSS, Edinburgh, Mayo 1-4, 1999. [ Links ]
[11]A. Lawrence. Modern Inertial Technology. Springer-Verlag, New York, 2da. edición, 1998. [ Links ]
[12]R. Margaria. Biomechanics and Energetics of Muscular Exercise. Clarendon Press, Oxford, 1976. [ Links ]
[13]National Geophysical Data Center. Internet, http://www.ngdc.noaa.gov/. [ Links ]
[14]O. Perrin, Ph. Terrier, Q. Ladetto, B. Merminod, y Y. Schutz. Improvement of walking speed prediction by accelerometry using altimetry validated by DGPS. En Med. Biol. Eng. Comp., Vol. 38, pp 164-168, 2000. [ Links ]
[15] W. Soehren y Ch. Keyez. Human motion based navigation algorithm development ieee positioning. En Location and Navigation Symposium, (PLANS), San Diego, Marzo 13-16, 2000. [ Links ]

