










Services on Demand
Journal
Article
 Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mailIndicators
-
 Cited by SciELO
Cited by SciELO -
 Access statistics
Access statistics
Related links
-
 Similars in
SciELO
Similars in
SciELO
Share

 Permalink
PermalinkRevista Boliviana de Física
On-line version ISSN 1562-3823
Revista Boliviana de Física vol.20 no.20 La Paz 2012
Construcción de un Lidar Monoestático coaxial de retrodispersión elástica en México para el monitoreo ambiental.
Reynoso Lara E., Dávila Pintle J.A., Nanco Hernández P., Rendón Marín M.
Fac. de Cs. De la Electrónica, Benemérita Universidad Autónoma de Puebla, México.
E-mail: ereynoso@ece.buap.mx
Serrano Muñoz G., Ramírez Ramírz G., Lima Coyotecatl E.
Fac. de Cs. de la Electrónica, Benemérita Universidad Autónoma de Puebla, México.
RESUMEN
La contaminación atmosférica es un problema delicado de importancia a nivel mundial, especialmente en México D.F. y sus principales metrópolis. Actualmente, factores tales como sobrepoblación, industrias, medios de transporte, quema de combustibles la han incrementado de manera alarmante, provocando una gran concentración de gases invernadero (dióxido de carbono, metano, óxido nitroso y clorofluorocarbonos) en la atmósfera, de tal manera que se han creado planes de contingencia ambiental; como un ejemplo el programa de hoy no circulan automóviles cuyas placas tengan una particular terminación numérica. Debido a esto se ha tenido la necesidad de un constante monitoreo de la calidad del aire de diferentes ciudades. Lamentablemente en México no se ha desarrollado y/o explotado técnicas de monitoreo a través de luz, en especial de luz laser (Lidar). En este trabajo se muestran las características principales de la construcción de un Lidar de retrodispersión elástica, con una fuente Laser pulsada de Nd:YAG en 1064 y 532nm. El rango de repetición de los pulsos es de 1-10 Hz con energías de 100 a 350mJ y duraciones de hasta 20ns en el modo de operación de Q-conmutada. El sistema de recolección de energía es un telescopio Newtoniano con una longitud focal de 121cm y un espejo primario de 20cm. El telescopio está montado sobre una base Dobsoniana que le permite girar en el plano horizontal (azimut) y en el plano vertical (zenit) para cambiar de altitud. El detector es un fotomultiplicador de la marca Hamamatsu con un rango espectral que va desde 400 a 1200nm. Para evitar el fenómeno de la compresión; es decir, regiones en donde no hay un perfecto traslape de las áreas del campo de visión del telescopio y la del haz laser, se decidió construir una configuración monoestática coaxial.
Key words: Dispersión elástica, monoestático coaxial.
INTRODUCTION
La contaminación atmosférica es un problema delicado de importancia a nivel mundial. Actualmente, factores tales como sobrepoblación, industrias, medios de transporte, quema de combustibles, etcétera; la han incrementado de manera alarmante, provocando una gran concentración de gases invernadero (dióxido de carbono, metano, óxido nitroso y clorofluorocarbonos) en la atmósfera, propiciando que los rayos solares queden atrapados en ella y de esta forma se produzca el calentamiento global.
Por otra parte, otro factor que afecta en gran medida a nuestro planeta es la acumulación de aerosoles en la atmósfera debido a que absorben o dispersan la radiación solar y evitan que ésta alcance la superficie terrestre generando el enfriamiento de la Tierra, que a su vez reduce la evaporación de la humedad de los suelos e incrementa la producción de nubes que persisten durante más tiempo sin producir lluvias.
Ante esta problemática, se han desarrollado diferentes métodos de monitoreo ambiental como son los convencionales que involucran la recolección de muestras de partículas suspendidas en la atmósfera para su análisis consecutivo en laboratorios ó métodos espectroscópicos de percepción remota que utilizan procedimientos ópticos para identificar las absorciones de las moléculas en varios rangos del espectro electromagnético con la finalidad de tener un control para evitar los constantes cambios que sufre la Tierra.
Uno de los métodos de interés más novedosos y efectivos para el monitoreo ambiental es la implementación de las técnicas LIDAR [1] que se utiliza principalmente para calcular: Perfiles de temperatura, humedad, presión, densidad de elementos, velocidades, etc. [2-5].
De acuerdo a su estudio y análisis la técnica LIDAR ofrece grandes beneficios en cuanto al monitoreo de la concentración de gases, aerosoles, átomos metálicos e iones en las diferentes capas de la atmósfera así como también a la determinación de los parámetros atmosféricos mencionados anteriormente gracias a su alta resolución espacial y temporal; además, detecta y proporciona información precisa acerca de la formación de fenómenos meteorológicos (huracanes, erupciones volcánicas, incendios forestales, etc.) ocasionados por aerosoles, a si mismo es aplicable en investigaciones oceánicas y militares.
En este trabajo se presenta un resumen de los criterios y detalles teórico-técnicos para el desarrollo de un sistema Lidar de retrodispersión elástica, monoestático coaxial.
DISEÑO DEL SISTEMA
Un sistema Lidar se puede implementar con dos tipos de configuraciones: La Biestática y la Monoestática. Consecuentemente, la configuración Monoestática se subdivide en dos categorías: arreglo Coaxial y arreglo Biaxial. La configuración empleada en este sistema es la monoestática coaxial debido a que esta configuración permite que el transmisor y el receptor tengan el mismo eje óptico.
En la Configuración Monoestática tanto el receptor como el transmisor se encuentran alineados en el mismo lugar, de manera que formen un solo arreglo. La determinación precisa del rango se establece por fuentes de luz pulsadas en el orden de nanosegundos. En un arreglo Coaxial el eje del haz laser coincide con el eje óptico del receptor. La función resultante de la combinación de estos efectos geométricos es llamada función de traslape del campo visual del receptor con el haz del láser.
El sistema Lidar en general se puede subdividir en tres subsistemas: Transmisor, Receptor y etapa de Detección y/o grabado. La fuente del Transmisor es un láser pulsado Nd:YAG con su línea fundamental 1064nm y con un cristal KTP de forma externa estamos generado su segunda armónica (Second Harmonic Generation, SHG) en 532 nm, la razón de repetición de los pulsos es del orden de 1-10 Hz con 350 mJ de energía por pulso en el modo de Q-conmutada y una duración de 15ns. El laser de Nd:YAG tiene dos formas de funcionamiento el de corrida libre y Q-conmutada, de estas dos formas se pueden obtener pulsos de diferente duración, lo cual es importante para el tamaño de la capa (bin range) de la atmósfera a monitorear. Las Figuras 1, 2 y 3 muestran la caracterización de los anchos de pulso en los diferentes tipos de funcionamiento y con distinta longitud de onda.
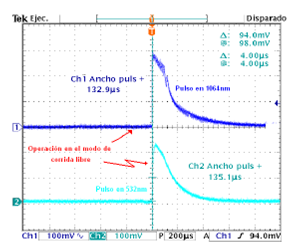
Figura 1. Características de los pulsos en 1064 y 532nm en el modo de corrida libre.

Figura 2. Características de los pulsos en 1064nm en el modo de Q-conmutada.
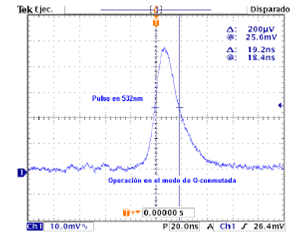
Figura 3. Características de los pulsos en 532nm en el modo de Q-conmutada.
El Receptor tendrá la función de colectar la mayor cantidad de luz retrodispersada por el elemento a monitorear, por lo tanto es común utilizar un telescopio.
En el sistema Lidar implementado se colocó un telescopio reflector Newtoniano de 20cm de diámetro y con un radio de curvatura de su espejo primario de 242cm, por lo tanto tenemos una longitud focal de 121cm y una razón focal de 6.05 la cual nos permitirá colectar la mayor cantidad de luz en un área bastante pequeña adecuada para el área efectiva del detector.
El telescopio está sobre una montura Dobsoniana (altitud- azimut ó altazimutal) que permite girar al telescopio en el plano horizontal (azimut) y en el plano vertical (zenit) para cambiar de altitud. Se decidió una montura Dobson por su sencillez en la implementación, portabilidad y firmeza que ofrece al hacer recorridas del cielo.
El tubo va montado sobre dos rodillos que descansan en dos baleros, que no sólo sirven para mover el telescopio sino también regulan la tensión del eje de altura.
El telescopio cuenta con un subsistema denominado periscopio, que es un instrumento para la observación desde una posición oculta. En su forma sencilla es un tubo con un juego de espejos en los extremos, paralelos y en un ángulo de 45⁰ respecto a la línea que los une.
La función que realiza el periscopio dentro del sistema Lidar es transmitir el haz láser en un mismo eje mediante el arreglo de espejos dentro de las dos áreas (transmisor y receptor), es decir, que se transmita coaxialmente a través del telescopio, por lo tanto para nuestro sistema Lidar utilizamos la configuración monoestática coaxial. Ver Figura 4.
Figura 4. Sistema Lidar monoestático coaxial de retrodispersión elástica.
SIMULACIÓN DEL PROCESO DE TRASLAPE DE AREAS DE LOS CAMPOS DE VISIÓN DEL HAZ LASER Y RECEPTOR.
Esta parte de la simulación tiene por objetivo demostrar el proceso que existe en el traslape de áreas del campo de visión tanto del transmisor (línea azul) como del receptor (línea roja) al variar la separación entre los dos ejes de acuerdo a un rango específico.
El factor de geometría se define como:
![]()
esta ecuación incluye la función de traslape ![]() entre el haz del laser y el campo de visión del receptor y el término cuadrático
entre el haz del laser y el campo de visión del receptor y el término cuadrático ![]() que decrece rápidamente la intensidad de la señal con respecto a la distancia; esto es debido al hecho de que el área del telescopio del receptor forma parte de la superficie de una esfera de radio
que decrece rápidamente la intensidad de la señal con respecto a la distancia; esto es debido al hecho de que el área del telescopio del receptor forma parte de la superficie de una esfera de radio ![]() que encierra el volumen de dispersión.
que encierra el volumen de dispersión.
Las gráficas de la figura 5 ilustran la simulación numérica dicho proceso de traslape de áreas, tomando en cuenta los valores reales de la divergencia del haz laser y el campo de visión del telescopio receptor.

Figura 5. Proceso de Traslape de los campos de visión del telescopio y la divergencia del haz laser, en la gráfica 1) existe una separación de 50 cm entre los dos ejes, la gráfica, en 2) de 30 cm, en 3) de 20 cm, y en 4) el traslape se da desde el origen.
De acuerdo a las gráficas 1), 2) y 3) de la figura anterior podemos observar que la configuración utilizada es la Monoestática Biaxial. En donde el transmisor se coloca adyacentemente al receptor alcanzando el traslape máximo a diferentes alturas dentro de un rango establecido. Por ejemplo de acuerdo a la figura 5, en la gráfica 1) el traslape inicia a una altura (rango) de 100 m, en la gráfica 2) en 54 m, en 3) en una altura de aproximadamente de 26.5 m y el rango entre el cuál se realiza el monitoreo es de 0 - 100 m.
Finalmente la gráfica 4) nos muestra la configuración Monoestática Coaxial en la cual tanto el transmisor y el receptor salen en un mismo eje y el traslape es desde el origen, lo cual beneficia en gran parte a nuestro sistema y a la simulación ya que mediante esta configuración, la función de traslape ![]() vale uno desde la altura ó rango R = 0; simplificando bastante la ecuación Lidar en general y su correspondiente simulación mumérica.
vale uno desde la altura ó rango R = 0; simplificando bastante la ecuación Lidar en general y su correspondiente simulación mumérica.
CONCLUSIONES
En este trabajo se presentan las características más importantes a tomar en cuenta en el diseño y desarrollo de un sistema Lidar de retrodispersión elástica monoestático coaxial. Se mencionaron las propiedades más importantes del transmisor, el laser de Nd:YAG, así como una muestra de las caracterizaciones a sus pulsos. Se reportaron los parámetros más importantes del receptor, como es el tipo de telescopio a utilizar y sus datos más característicos. En la etapa de detección y grabado se define el tipo de PMT a utilizar y en que modo va a operar (conteo de fotones).
REFERENCIAS
1. Lidar: Range-resolved optical remote sensing of the atmosphere, Claus Weitkamp, Optical Sciences Springer 2005. [ Links ]
2. Applied Optics Vol. 18 No. 23 Dec. 1979 [ Links ]
3. Applied Optics Vol. 22 No. 23 Dec. 1983 [ Links ]
4. Applied Optics Vol. 42 No. 16 Dec. 2003 [ Links ]
5. Applied Optics Vol. 46 No. 36 Dec. 2007 [ Links ]

