











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introducción
La fisioterapia es el área de la salud dedicada al estudio del movimiento humano, entendido como un conjunto de mecanismos que posibilitan la realización de las actividades cotidianas. Dentro de este estudio se encuentra la biomecánica que profundiza en el estudio de elementos tales como fuerza muscular, rangos de movimiento, aceleración, velocidad y desplazamiento. En la actualidad, el estudio del movimiento corporal se realiza con el apoyo de la tecnología, la cual permite obtener lecturas precisas y monitorear digitalmente las variables (Mantilla, 2019).
El artromotor es un dispositivo que permite la movilidad articular; el primer artromotor se presentó en 1908 por Gabriel Bidou como un aparato mecánico diseñado para realizar movilizaciones articulares precisas ya que se buscaba obtener amplitudes de movimiento perfectamente conocidas (Wirotius, 1999). Además, estudios reflejaron que el uso del artromotor estimula y regenera el cartílago y ligamentos dañados, mejora cicatrización de los tejidos tras una intervención quirúrgica, disminuye la inflamación en la articulación, evita la trombosis venosa después de la intervención quirúrgica y mejora la coordinación y la recuperación del déficit propioceptivo (Insausti Ferrando, 2021). Por estos motivos, en años recientes, se ha impulsado su uso en la fisioterapia para el tratamiento de lesiones en la rodilla.
En países desarrollados, los artromotores están disponibles en el mercado comercial y pueden ser adquiridos directamente por clínicas y hospitales, lo que facilita su integración en los tratamientos de rehabilitación. Ejemplos de estos dispositivos incluyen el FISIOTEK 3000 GS, un artromotor para rodillas y caderas (FISIOTEK SRL, 2024), y el Artromot-K3 CPM (Movimiento Pasivo Continuo) para rodillas (ORMED GmbH, 2012).
Sin embargo, en el contexto nacional, los fisioterapeutas bolivianos generalmente no tienen acceso a artromotores por su elevado costo, que se debe a los gastos de importación y la falta de producción local. Además, los equipos disponibles en la región tienen una funcionalidad limitada, ya que únicamente generan secuencias de movimiento sin aprovechar las señales electromiográficas para tomar decisiones en cuanto a sus movimientos.
La presente investigación aborda el desarrollo de un artromotor para la rodilla que llegará a trabajar en dos modos. El primero es de asistencia completa capaz de monitorear la amplitud de la articulación, modificar la velocidad a la cual se realizarán los movimientos flexoextensivos y programar ciclos de trabajo. El segundo modo de trabajo, además, hace uso de las señales mioeléctricas de los músculos implicados en el movimiento flexo-extensivo para detectar si los músculos estén realizando un esfuerzo, ante el cual el artromotor apoyará con el movimiento. El sistema cuenta con una interfaz gráfica para el monitoreo y programación de ambos modos de trabajo con una opción de registro de datos.
Es importante destacar que los artromotores conocidos en el contexto local solo funcionan en el primer modo mencionado, por ende, el equipo desarrollado proporciona beneficios adicionales.
Se ha validado el sistema realizando pruebas con personas de diferentes alturas y pesos confirmando que el sistema automatiza la tarea del fisioterapeuta, con la precisión angular y velocidad apropiadas.
2 Antecedentes
Para conocer los antecedentes, se llevó a cabo una revisión de los trabajos relacionados con este tema, seguido por un análisis del contexto nacional que incluyó entrevistas con fisioterapeutas y una revisión de la literatura disponible.
2.1 Estudios previos
Existen algunos trabajos relacionados al presente proyecto realizados en años previos como ser el proyecto realizado en Ecuador por Arellano, Coria, Gil y Meza. Este consiste en un sistema robótico de rehabilitación funcional para el brazo, que colabore con el tratamiento de traumatismos articulares el cual consta de un sistema que permite el movimiento angular del brazo con ayuda de un motor y se puede controlar las secuencias de funcionamiento. Se enfatizó el uso del dispositivo ideado para el apoyo al fisioterapeuta y no así a la sustitución de este. Como resultados se destaca la comodidad que brinda al fisioterapeuta y al paciente al momento de realizar la rehabilitación(Arellano et al., 2010).
En Colombia, Ballén y Benavides realizaron un prototipo para movimiento continuo - pasivo recíproco de cadera y rodilla en pacientes pediátricos como proyecto de grado en la Universidad Libre de Colombia en el cual se busca una solución económica en comparación a modelos existentes en el mercado. Programaron el movimiento articular de la rodilla obteniendo como resultado un modelo de mayor peso a los modelos comerciales, pero llegando a cumplir con todas las especificaciones técnicas puestas a comparación (Ballén Velásquez & Benavides Benavides, 2020).
En Bolivia en la ciudad de La Paz el año 2021 se desarrolló un exoesqueleto de rehabilitación para lesiones por artrosis de la rodilla y se validó el funcionamiento probando la actividad muscular durante la marcha haciendo uso de señales EMG. Este proyecto fue planteado debido a las condiciones deficientes en equipos de rehabilitación en los centros médicos de Bolivia a pesar de la alta incidencia de la enfermedad (Barbosa & Valverde, 2021).
2.2. Contexto local
En Bolivia, cada año ocurren de cuatro a diez casos de lesiones a nivel de la rodilla por cada mil habitantes, siendo las causas más comunes el deporte en varones y caídas en mujeres (Romero Carrasco & Sierra Nieto, 2022).
Mediante entrevistas aplicadas a fisioterapeutas en Cochabamba se identificaron las características del proceso de rehabilitación en las lesiones de rodilla. Según los profesionales, la rehabilitación consta de tres etapas: dolor, amplitud articular y fuerza.
La etapa del dolor tiene por objetivo controlar y reducir el dolor experimentado por el paciente; En la etapa de amplitud articular se realizan movimientos manuales y repetitivos para restaurar la amplitud de la articulación; Finalmente en la etapa de fuerza se ocasiona resistencia al movimiento para fortalecer los músculos (Loeza-Magaña, 2015).
Las entrevistas también destacaron los desafíos que enfrentan los fisioterapeutas debido a la falta de tecnología disponible en los gabinetes de rehabilitación, lo que deriva en una rehabilitación poco o no monitoreada y lenta en los pacientes. Los artromotores conocidos por los entrevistados solo sirven para la etapa de amplitud y tienen un precio elevado que dificulta su obtención.
Tomando en consideración los trabajos relacionados previamente explorados y el contexto local identificado, la presente investigación propone el desarrollo de un artromotor de asistencia destinado a la rehabilitación automatizada de la rodilla, haciendo uso de los estímulos mioeléctricos, para contribuir a la labor de los fisioterapeutas locales.
3 Desarrollo del artromotor
El desarrollo del artromotor requirió: (i) evaluar el funcionamiento de la rodilla para la obtención de especificaciones técnicas, (ii) desarrollar el sistema mecánico del artromotor para el soporte y limitación de movimientos de la rodilla, (iii) elaborar el sistema electrónico para la activación del movimiento del artromotor y la obtención de señales electromiográficas, y (iv) implementar una interfaz web de monitoreo y control de la posición del artromotor.
3.1 Especificaciones técnicas para el artromotor
En Bolivia, cada año ocurren de cuatro a diez casos de lesiones a nivel de la rodilla por cada mil habitantes, siendo las causas más comunes el deporte en varones y caídas en mujeres (Romero Carrasco & Sierra Nieto, 2022).
a) Requerimientos del sistema: Se seleccionaron los requerimientos tomando en cuenta las funcionalidades básicas que tienen los artromotores existentes, la bibliografía leída y los parámetros que los fisioterapeutas entrevistados necesitan monitorear al momento de rehabilitar la rodilla.
El requerimiento más importante que se determinó es que el artromotor pueda trabajar en 2 modos: pasivo asistido refiriéndose a la rehabilitación de la amplitud articular y el modo activo asistido que se refiere a la rehabilitación muscular donde el artromotor solamente se moverá si detecta actividad muscular. Basándose en esto, se establecen los siguientes requerimientos:
Estructura para pacientes en un rango de altura de 130 - 200 cm.
Estructura para pacientes de hasta 100 kg de peso máximo.
Monitoreo de la amplitud articular.
Movimiento articular de 60° a 190°, lo que supone un trabajo de rango normal a hiperextensión.
Recorrido de 500 mm aproximadamente.
Monitoreo de la actividad muscular.
Programación de ciclos de trabajo, con una velocidad que debe ir desde 0,5° de amplitud por segundo a 2,5° de amplitud por segundo.
Interfaz que permita la visualización de datos.
Almacenamiento de los datos por paciente.
b) Selección de Tecnologías: Para el desarrollo del proyecto se necesitan distintos componentes entre sensores, actuadores, sistema embebido y software. Estos fueron seleccionados mediante una comparación entre distintas opciones aplicables al proyecto. Se puntuó a los distintos componentes en base a sus características técnicas y pertinencia con la investigación. Se seleccionaron los que resultaron más adecuados:
Software de diseño CAD: SolidWorks.
Software de diseño y simulación de circuitos electrónicos: EasyEDA.
Material para el esqueleto del artromotor: Acero Inoxidable.
Material para los acoples del esqueleto: PETG (tereftalato de polietileno modificado con glicol).
Sistema embebido: Raspberry Pi 4B+.
Sensor de posición angular: Potenciómetro de precisión.
Sensor de señales electromiográficas: Muscle Sensor V3.
Actuador lineal: motor lineal de tornillo PFDE24V- 500-15.
Conversor ADC: ADS1115.
3.2 Sistema mecánico
a) Cálculos previos: Se parte el análisis con un diagrama de cuerpo libre (DCL) para analizar la fuerza que el actuador lineal debe ejercer para mover la pierna de una persona de 100 kg, límite en peso planteado en el proyecto.
Se utiliza la relación teórica para determinar el peso de la pierna en base al peso corporal total (Encolombia, 2024).
El sujeto de prueba mide 190 cm de altura, con un fémur de 47 cm y una tibia de 52 cm. Se considera que pesa 100 kg para el diagrama de cuerpo libre. La sección del cuerpo desde la cadera hasta la rodilla pesa el 11,6% del peso total, y desde la rodilla hasta el pie, incluyendo el pie, el 7,1%. Así, la masa total de una pierna del sujeto de prueba es de 18,7 kg.
Se halló la fuerza normal ejercida por la pierna considerando el valor de la gravedad y la masa de la pierna:
Según la literatura, se ha observado que la rodilla en buen estado presenta un coeficiente de fricción mínimo. Sin embargo, para iniciar el movimiento desde el reposo, se considera un coeficiente estático de 2 en el peor escenario. Este valor es adecuado para el análisis de rodillas en proceso de rehabilitación (Sanitas, 2024). Entonces se puede determinar la fuerza que debe ejercer el motor para romper el reposo en el caso planteado, igualándola a la fuerza de fricción:

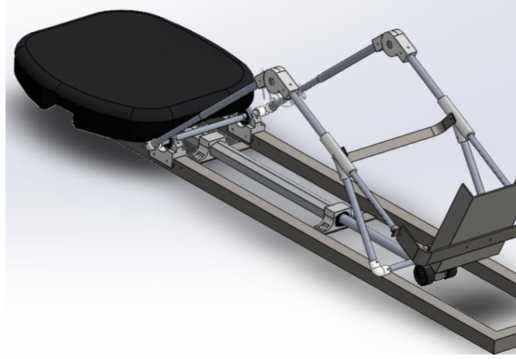
b) Diseño CAD del artromotor: El diseño del artromotor se basó en modelos existentes, pero requirió modificaciones para incluir la rehabilitación de la fuerza muscular además de los movimientos flexo-extensivos. Se realizó el siguiente diseño considerando que para la rehabilitación de la fuerza muscular se realizará un esfuerzo en la pierna, el paciente no se puede encontrar apoyado fuera del artromotor ya que esto significaría un desplazamiento del equipo.
El requerimiento más importante que se determinó es que el artromotor pueda trabajar en 2 modos: pasivo asistido refiriéndose a la rehabilitación de la amplitud articular y el modo activo asistido que se refiere a la rehabilitación muscular donde el artromotor solamente se moverá si detecta actividad muscular. Basándose en esto, se establecen los siguientes requerimientos:
La estructura es capaz de responder ante movimientos de flexión y extensión.
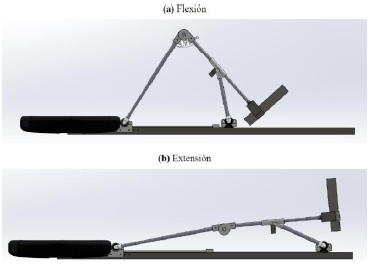
Como puede verse en la Figura 2, la articulación es un conector de bisagra de dos vías, que permite un desplazamiento de 0° a 200° recordando que el necesario para el artromotor es de hasta 190°. El conector de bisagra se diseñó con el fin de poder acoplar el sensor de posición angular para medir el ángulo de amplitud de la rodilla. Adicionalmente, se diseñó una tapa que cubra al sensor de posición y se agregó un soporte con un botón de emergencia con el que el paciente puede detener el artromotor.
Para el soporte de los pies se diseñó una plancha rectangular acoplada al resto de la estructura mediate otra plancha en forma de C. Adicionalmente, se tiene una plancha más en forma de C ubicada por encima de la anterior con el fin de sostener la pantorrilla y brindar firmeza en la estructura como puede verse en la Figura 1.
La base se diseñó para sujetar al actuador lineal y al asiento donde irá el paciente. El asiento se colocó sobre el motor para evitar una estructura demasiado larga, pero no está apoyado directamente sobre el motor, sino sobre la estructura.
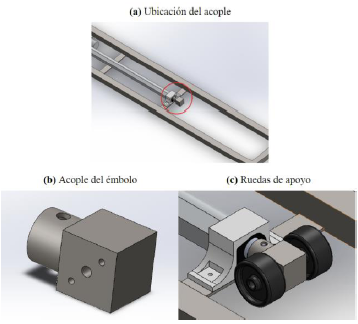
El actuador lineal tiene un acople en la punta del émbolo para facilitar el agarre de la estructura y el acople de ruedas, evitando que el émbolo se incline bajo el peso de la pierna del paciente. El detalle del acople se muestra en la Figura 3.
Finalmente, se optó por incluir rodamientos en el diseño para facilitar el desplazamiento de la pierna. Estos se encuentran posicionados en los 2 puntos de soporte de las varillas de la estructura con la base.
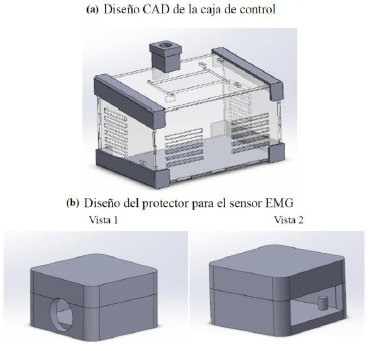
A parte de la estructura mecánica, se diseñó una estructura capaz de contener a los componentes electrónicos, que consta de cuatro paredes con una base y tapa con distintos cortes para la salida de conectores, un botón, pantalla y para la ventilación. Adicionalmente, se diseñó el protector para los dos sensores EMG que debido a su funcionalidad no se pueden encontrar dentro de la caja de control. La caja de control se puede observar en la Figura 4.
a) Análisis de esfuerzos: Para realizar el análisis de esfuerzos, es necesario considerar varios escenarios. El artromotor operará en dos modos: en el modo pasivo asistido, el paciente no ejercerá fuerza adicional a su peso, mientras que en el modo activo asistido sí lo hará. Además, se deben tener en cuenta ambas posiciones para cada uno de estos modos: la posición de extensión y la de flexión, tal como se muestra en la Figura 2, dando 4 posibles escenarios para el análisis.
Para el análisis se tomarán los valores máximos de longitud con los que cuenta el diseño, que son para una persona de 200 cm, tomando la masa de una pierna de 18,7 kg.
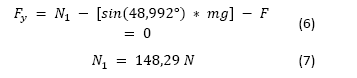
Se realizó el mismo cálculo para los cuatro escenarios; a continuación, se presenta el que caso crítico que representa el esfuerzo máximo encontrado, que corresponde a la posición de flexión en modo activo asistido. El diagrama de cuerpo libre se ilustra en la Figura 5.
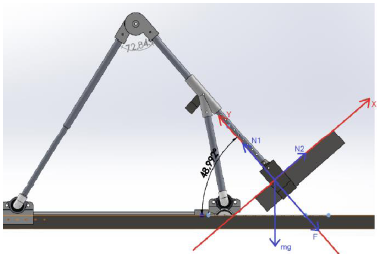
Donde:
m es la masa de la pierna.
g es la gravedad.
N 1 es la normal ejercida por la pierna sobre el eje Y.
N 2 es la normal ejercida por la pierna sobre el eje X.
F es la fuerza adicional ejercida por el paciente. Estimada en 10N según los fisioterapeutas.

Con las fuerzas halladas se realizó el análisis de tensiones de Von Mises, cuyos resultados se presentan en la Figura 6.
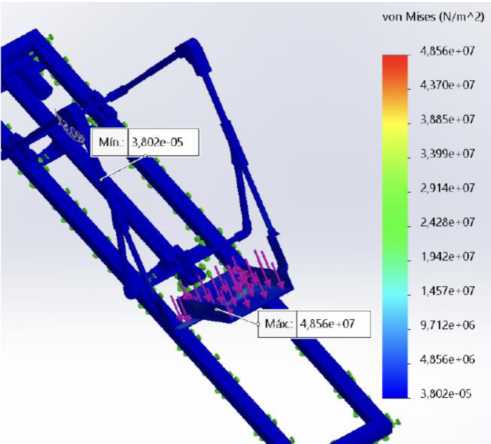
Además, se realizaron los análisis de desplazamientos y deformaciones donde se encontró que el desplazamiento máximo es de 1,292x10-1 mm y la deformación unitaria máxima es de 1,286x10-4, valores tolerables para el sistema.
3.3 Sistema electrónico
Inicialmente, se diseñó todo el sistema de alimentación para el sistema electrónico usando una fuente de 24 V para alimentar el motor y un circuito buck para reducir el voltaje para los sensores, conmutadores, pantalla LCD y sensores. La interacción de los componentes se detalla en la Figura 7:
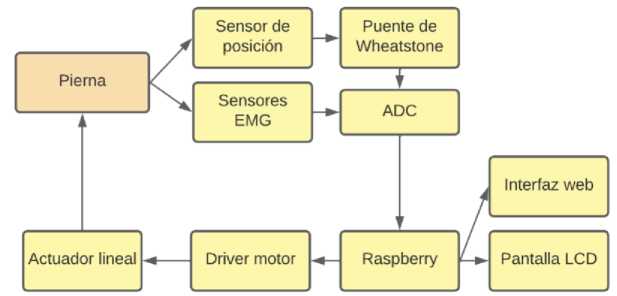
La única diferencia entre el modo de trabajo activo y pasivo es que en el primero la activación se basa en la lectura de los sensores EMG. Para que la lectura del valor del ángulo proporcionado por el potenciómetro de precisión sea lo más exacta posible, se utilizó un puente de Wheatstone para para compensar cualquier variación en la resistencia del potenciómetro y garantizar una medición precisa y consistente.
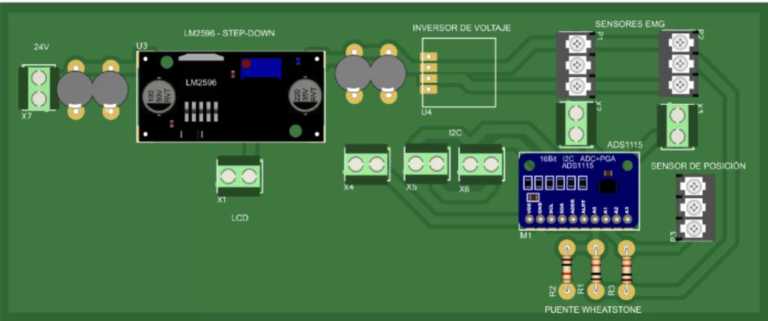
Se llevaron a cabo todas las conexiones en una placa de circuito impreso (PCB) ilustrada en la Figura 8.
La Figura 9 muestra los esquemas de las partes más significativas del conexionado electrónico. En resumen, se tienen dos pines que permiten el envío de señales PWM para controlar la velocidad del motor en ambas direcciones, capacitores a la entrada de la alimentación para filtrar ruido, un inversor de voltaje para alimentar a los sensores EMG que necesitan de +3,3 V y -3,3 V, un conversor ADC para enviar la señal al controlador, una pantalla LCD conectada mediante buses I2C, un botón de emergencia y un botón que reinicia la posición del artromotor.
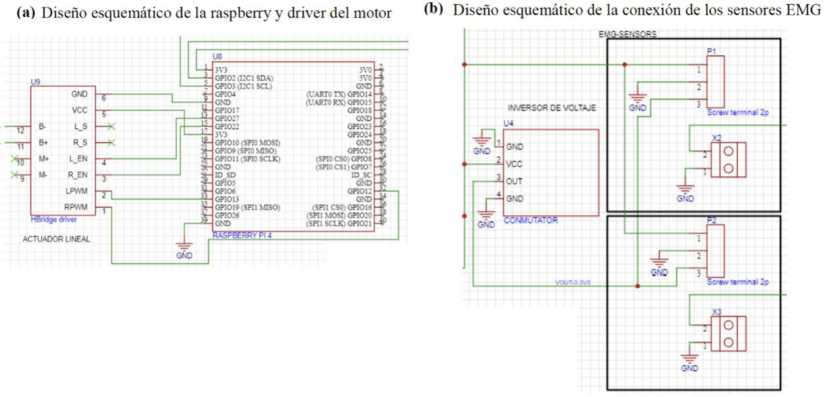
El ADS1115 presenta una frecuencia de muestreo máxima de 860 Hz por tanto la frecuencia de Nyquist es la mitad, 430 Hz. Las señales electromiográficas concentran su energía entre los 50-150 Hz frecuencia que se encuentra debajo de la frecuencia de Nyquist, por tanto la frecuencia de muestreo es apropiada para el sistema (Morales Pedraza & Pérez Gómez, 2005).
Finalmente, se armó una caja de control para sostener los componentes. La caja es de acrílico puesto su única función es aislar a la placa PCB y la fuente de alimentación. En la caja de control se incluye una pantalla LCD y un botón de parada de emergencia que puede ser accionado por el fisioterapeuta para detener todo el proceso. Adicionalmente se tiene otro botón de parada de emergencia ubicado sobre una de las bisagras de dos vías para que pueda ser accionado por el paciente.

3.4 Software
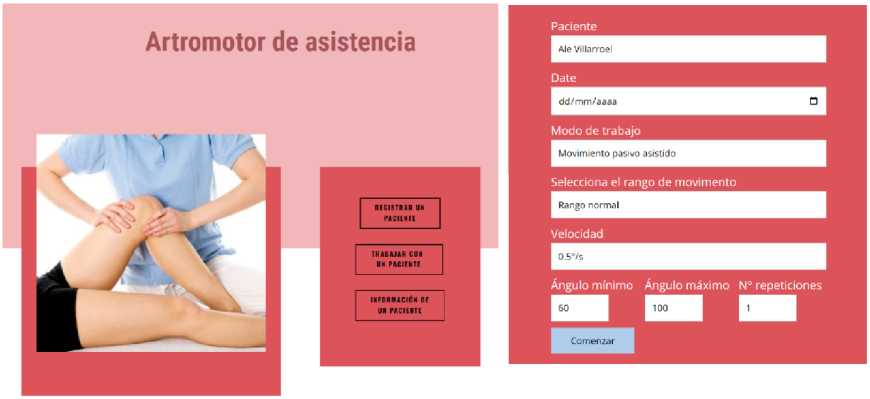
Se empleó el lenguaje Python utilizando el framework Flask para el desarrollo de la aplicación web. Se manejan hojas de estilo CSS y HTML para la personalización de la interfaz. Toda la operación se controla localmente, ya que es el fisioterapeuta quien maneja el artromotor y registra los datos a través de la interfaz de la aplicación.
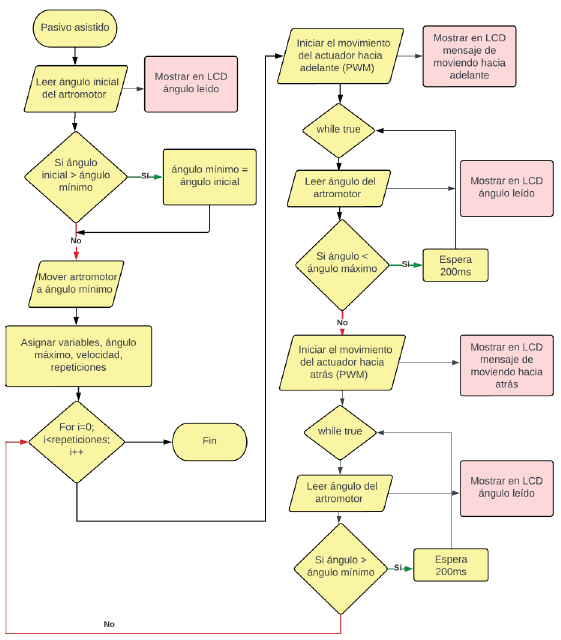
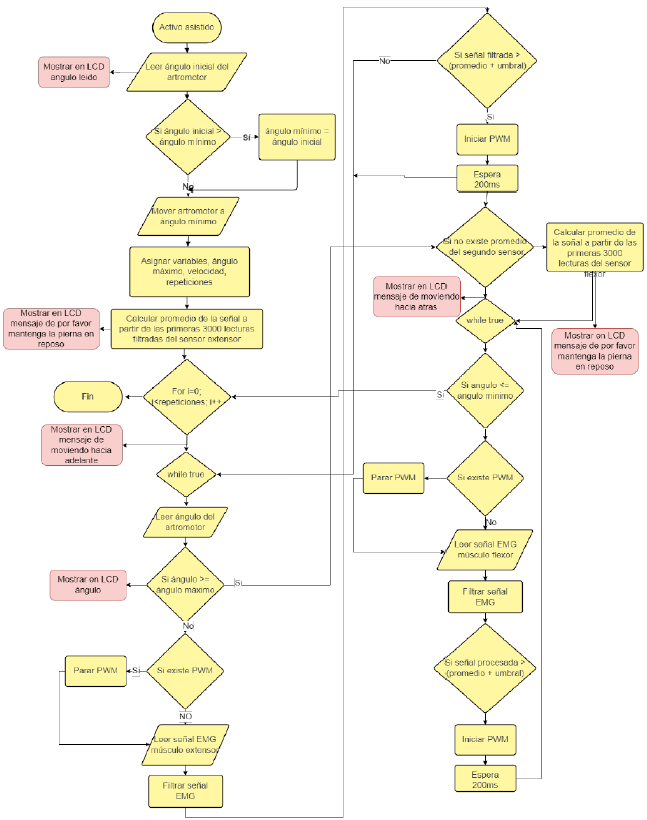
El proceso, ilustrado en la Figura 11, sigue la siguiente secuencia: Primero se toma en cuenta el ángulo al que se encuentra el artromotor; si es menor al ángulo mínimo del ciclo de trabajo se lo modifica accionando al actuador lineal hasta que sean iguales. Una vez hecho esto, se asignan las variables del ciclo de trabajo y se comienza a ejecutar la sesión en modo pasivo asistido. En esta etapa, se inicia el movimiento del actuador, causando una amplitud articular hasta el valor máximo programado. Durante todo el movimiento, el ángulo se lee cada 200 ms y se lo muestra en la pantalla LCD. Una vez alcanzado el ángulo máximo, se reinicia el movimiento de retorno con la misma lógica.
Para el modo activo asistido, la lógica es similar. No obstante, en este modo se tiene un paso previo a la activación del actuador en el que se tomarán las señales de los sensores EMG, ya que estas pasan por un filtrado digital y son analizadas para determinar la activación del actuador, como se muestra en la Figura 12.
Finalmente, en la aplicación web se proporciona una interfaz que permite al fisioterapeuta registrar tanto los datos de los pacientes como los detalles de cada sesión en una base de datos local a través de una interfaz gráfica. La base de datos es relacional, y contiene dos entidades, una para los pacientes y una para las sesiones. Considerando que cada registro ocupa 600 bytes en memoria y que la capacidad de almacenamiento de la Raspberry Pi es de 23 GB, se determinó que se pueden almacenar hasta 38 333 333,33 registros. Con un promedio de 8 registros por día, esto equivale a un período de almacenamiento de aproximadamente 18 429 años.
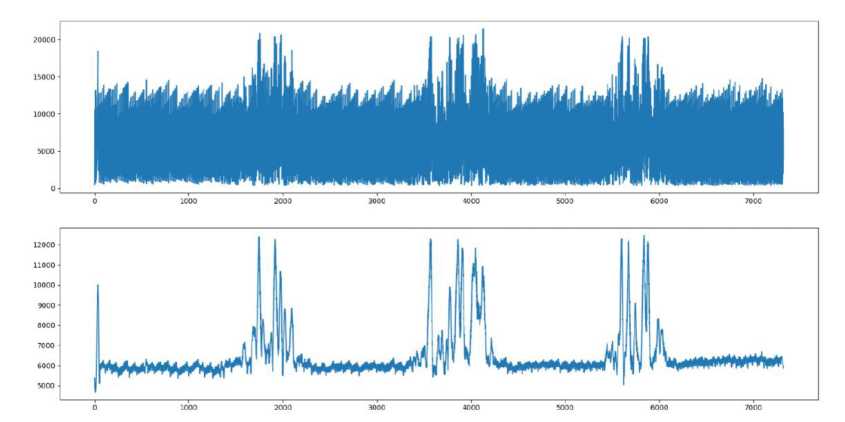
Las señales medidas por los sensores EMG deben ser filtradas para una mejor visualización e interpretación por lo cual se utilizó el filtro de Savitzky y Golay (Zuñiga Torres, 2018). Para implementar este filtro, se empleó la función savgol_filter de la librería SciPy, una biblioteca de Python dedicada al procesamiento de señales (Virtanen et al., 2020). La Figura 14 muestra los electrodos que captan las señales EMG.

En la Figura 15 se pueden observar los picos referidos al esfuerzo realizado en el músculo. Esta actividad muscular adquiere mayor claridad luego de la aplicación del filtro de Savitzky y Golay.
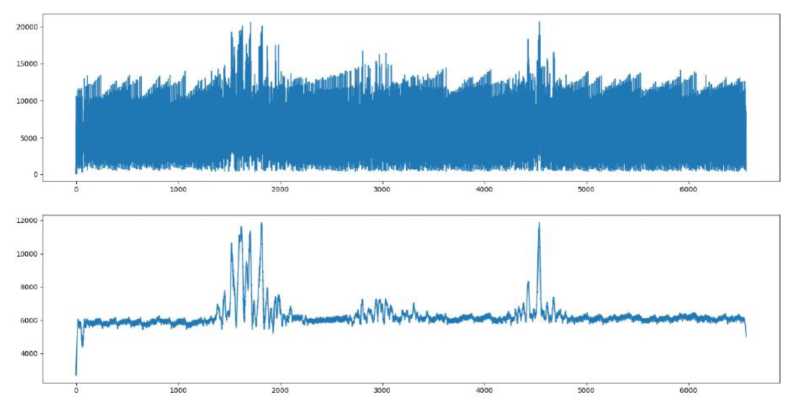
En la Figura 16 se pueden identificar los picos que representan la actividad muscular durante la flexión. Estos picos de actividad se vuelven mucho más evidentes después de aplicar el filtro de Savitzky-Golay.
3.5 Sistema final
Después de desarrollar cada componente del artromotor, se integraron todas estas partes en el sistema final. Esto implicó ensamblar el sistema mecánico diseñado para soportar y regular los movimientos de la rodilla, junto con el sistema electrónico que controla tanto la activación del artromotor como la captura de señales electromiográficas. Se integró el sistema con la interfaz web para monitorear y controlar la posición del artromotor.
Se posicionó el prototipo sobre plástico para simular el escenario de trabajo del fisioterapeuta que sería sobre una camilla, aislando el contacto con tierra para el paciente. Esto es importante para el modo trabajo activo asistido ya que el contacto con tierra no permitiría la lectura de las señales EMG. También cabe resaltar que se aisló el soporte del pie y pantorrilla con cuerina y esponja para evitar el contacto directo con lo metálico de la estructura.

4 Resultados
Luego de una evaluación y planificación de pruebas, se realizaron diez pruebas con cinco personas de distintos tamaños y pesos, efectuando dos pruebas con cada una de ellas. Las personas contaban con las siguientes características:
158 cm de altura y 53 kg de peso total
163 cm de altura y 75 kg de peso total
173 cm de altura y 83 kg de peso total
178 cm de altura y 87 kg de peso total
180 cm de altura y 80 kg de peso total
Para validar el correcto funcionamiento del movimiento articular que genera el artromotor se utilizó un goniómetro. Se posicionó este instrumento de medición de ángulo para coincidir con el ángulo de flexión de la rodilla esperado. En la Tabla 1 se pueden observar los resultados medidos de la amplitud articular por el sensor y el goniómetro.
Tabla 1. Comparación de ángulos
| Persona | Angulo mínimo | Sensor | Goniómetro | Angulo máximo | Sensor | Goniómetro |
|---|---|---|---|---|---|---|
| 1 | 80° | 81° | 79° | 150° | 152° | 153° |
| 1 | 80° | 79° | 82° | 150° | 152° | 152° |
| 2 | 80° | 82° | 79° | 150° | 149° | 151° |
| 2 | 80° | 81° | 80° | 150° | 150° | 148° |
| 3 | 80° | 81° | 81° | 150° | 149° | 149° |
| 3 | 80° | 78° | 81° | 150° | 152° | 151° |
| 4 | 80° | 78° | 78° | 150° | 148° | 150° |
| 4 | 80° | 79° | 82° | 150° | 153° | 151° |
| 5 | 80° | 78° | 80° | 150° | 150° | 148° |
| 5 | 80° | 82° | 81° | 150° | 149° | 150° |
En las pruebas realizadas se corroboró que el artromotor se mueve a la posición angular correcta. Para determinar la exactitud, se promediaron los ángulos medidos por el sensor:

A partir del cual se puede obtener un error absoluto utilizando la siguiente ecuación:

A partir del error absoluto se obtiene el error relativo bajo la siguiente ecuación:

Se determinó que el sensor tiene un error relativo de 0,00125° por cada grado medido. Este desplazamiento angular, junto con el error absoluto y el error relativo, se compartió con una fisioterapeuta que evaluó el sistema. Ella concluyó que esta precisión es más que adecuada, especialmente considerando que las mediciones manuales con goniómetros dependen de la habilidad y consistencia del operador, y no son muy exactas.
Adicionalmente, durante las pruebas realizadas se midió el tiempo de desplazamiento del sistema. El sistema permite seleccionar diferentes velocidades, desde 0,5 hasta 2,5 grados por segundo, con incrementos de 0,5. En las diez pruebas realizadas se cronometró el tiempo de desplazamiento a distintas velocidades, como puede verse en la Tabla 2.
Tabla 2. Tiempos medidos y calculados
| Persona | Velocidad [°/s] | Desplazamiento [°] | Tiempo transcurrido [s] | Tiempo esperado [s] |
|---|---|---|---|---|
| 1 | 0,5 | 50 | 96,7 | 100,0 |
| 1 | 1,5 | 52 | 33,5 | 34,6 |
| 2 | 2,0 | 25 | 11,9 | 12,5 |
| 2 | 1,0 | 50 | 48,4 | 50,0 |
| 3 | 2,5 | 70 | 26,8 | 28,0 |
| 3 | 0,5 | 86 | 164,6 | 172,0 |
| 4 | 1,0 | 88 | 85,2 | 88,0 |
| 4 | 2,5 | 95 | 36,6 | 38,0 |
| 5 | 1,5 | 22 | 14,0 | 14,6 |
| 5 | 2,0 | 40 | 19,3 | 20,0 |
En todas las pruebas, como se indica en la Tabla 3, los tiempos reales resultaron ser menores a lo esperado. Por lo tanto, se calculó el error relativo porcentual para cada medida.
Tabla 3. Errores porcentuales en los tiempos medidos
| Persona | Velocidad [°/s] | Desplazamiento [°] | Tiempo transcurrido [s] | Tiempo esperado [s] | Error relativo porcentual % |
|---|---|---|---|---|---|
| 1 | 0,5 | 50 | 96,7 | 100,0 | 3,3 |
| 1 | 1,5 | 52 | 33,5 | 34,6 | 3,2 |
| 2 | 2,0 | 25 | 11,9 | 12,5 | 4,8 |
| 2 | 1,0 | 50 | 48,4 | 50,0 | 3,2 |
| 3 | 2,5 | 70 | 26,8 | 28,0 | 4,3 |
| 3 | 0,5 | 86 | 164,6 | 172,0 | 4,3 |
| 4 | 1,0 | 88 | 85,2 | 88,0 | 3,2 |
| 4 | 2,5 | 95 | 36,6 | 38,0 | 3,6 |
| 5 | 1,5 | 22 | 14,0 | 14,6 | 4,1 |
| 5 | 2,0 | 40 | 19,3 | 20,0 | 3,5 |
A partir de los datos anteriores, se calculó un error promedio del 3,75% en la velocidad del sistema. Al igual que en la precisión angular, este nivel de precisión en la velocidad se considera adecuado, especialmente al compararlo con los procesos manuales de movimiento de la rodilla por parte del fisioterapeuta, que suelen carecer de un tiempo definido o se realizan aproximadamente.
Al hacer la evaluación con los pacientes se verificó el funcionamiento correcto del sistema y se constató que su uso automatiza la tarea del fisioterapeuta, con la precisión angular y velocidad apropiadas.
Adicionalmente, se elaboró un manual de usuario que permite la comprensión del funcionamiento del artromotor explicando los modos de funcionamiento junto a las partes que lo componen y el manejo de la interfaz web. Esto permitirá que los fisioterapeutas sepan cómo operar eficazmente el sistema para la rehabilitación de los pacientes.
5 Conclusiones
El sistema desarrollado funciona correctamente en modo pasivo asistido para la rehabilitación de la amplitud articular y en activo asistido para la rehabilitación de la fuerza muscular, haciendo uso de estímulos mioeléctricos para la activación del artromotor en el segundo modo. Este asiste al fisioterapeuta de manera que no se vea sometido a esfuerzos prolongados además de permitir el monitoreo tanto de la amplitud articular y de la actividad muscular.
La estructura del sistema se diseñó a partir de entrevistas a fisioterapeutas, revisión bibliográfica sobre artromotores, la biomecánica de la rodilla y su rehabilitación. Ésta es ajustable a distintas longitudes de pierna y además permite el monitoreo y la visualización de los datos. La estructura contempla pacientes de 130-200 cm de altura con un peso máximo de 100 kg. Además, cuenta con un asiento incorporado y está diseñada para posicionarse sobre una camilla.
El sistema funciona a distintas velocidades con un error de 3,75% y con una precisión angular de relativo de 0,00125° por cada grado medido. La velocidad y precisión angular del sistema son más que adecuadas para la rehabilitación de la rodilla, según los fisioterapeutas consultados.
Todo el sistema se maneja de manera local por medio de un servidor e interfaz web en el framework Flask, usando el lenguaje de programación Python. Esto permite al fisioterapeuta controlar todo el proceso, ingresar datos del paciente, y monitorear las sesiones.
El artromotor desarrollado ofrece una solución tecnológica accesible para la rehabilitación de la rodilla en Bolivia, superando las limitaciones de equipos actuales. Automatiza tareas del fisioterapeuta, mejora la precisión y permite el monitoreo y registro de datos, contribuyendo significativamente a la fisioterapia local.
A lo largo del desarrollo, se identificaron dificultades que aportaron importantes aprendizajes. En primer lugar, la falta de experiencia práctica de los fisioterapeutas en el uso de artromotores limitó la precisión de sus observaciones y sugerencias, lo que motivó ajustes en el diseño para hacerlo más intuitivo y funcional en entornos clínicos. También se destacó la importancia de un correcto posicionamiento de los electrodos, ya que una colocación inadecuada, especialmente por personal no especializado en fisioterapia, afectó tanto la lectura de las señales mioeléctricas como el funcionamiento del sistema. Estos hallazgos subrayan la necesidad de asegurar que el personal que operará el equipo esté debidamente capacitado.

